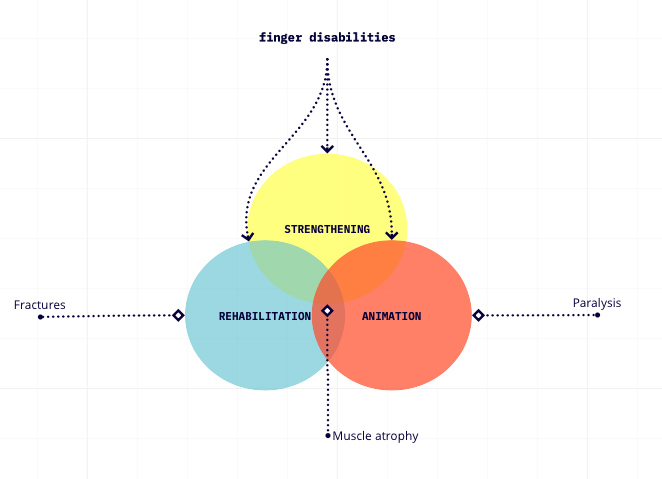
PROBLEM: People experiencing finger -specific motor disabilities are often asked to participate in rehabilitation sessions, either within clinical settings or at home. Unfortunately, a lot of them (including me) do not execute the instructed exercises for finger strengthening and as a result their traumatised fingers may not fully recover back to their original potential.
SOLUTION: RehabActuators constitute a portable, soft robotic wearable that exploits tangible interaction to motivate patients to execute finger exercises like bending/unbending. RehabActuators turns rehabilitation into a playful activity, where the participant can manipulate its own finger by using interacting with the interface.
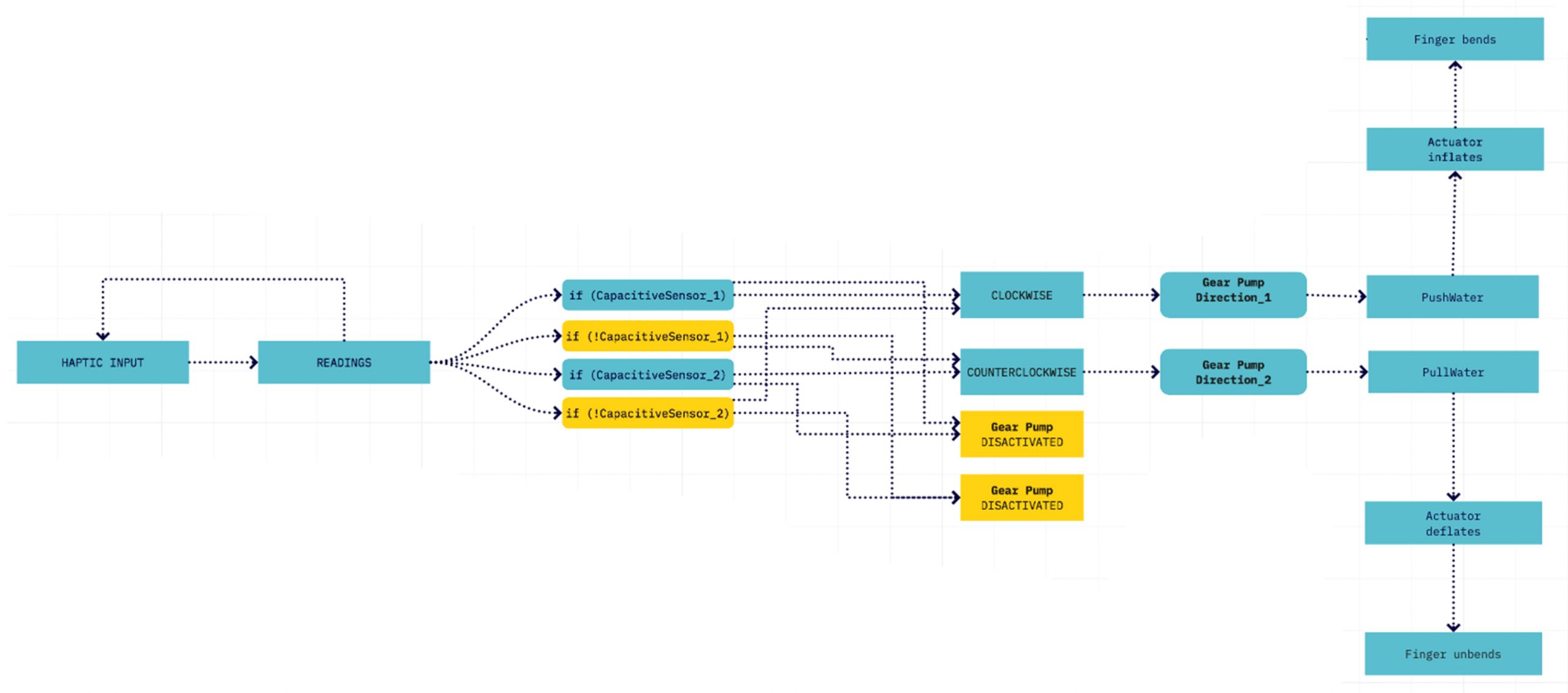
Computational Logic:
Told Design & Fabrication:

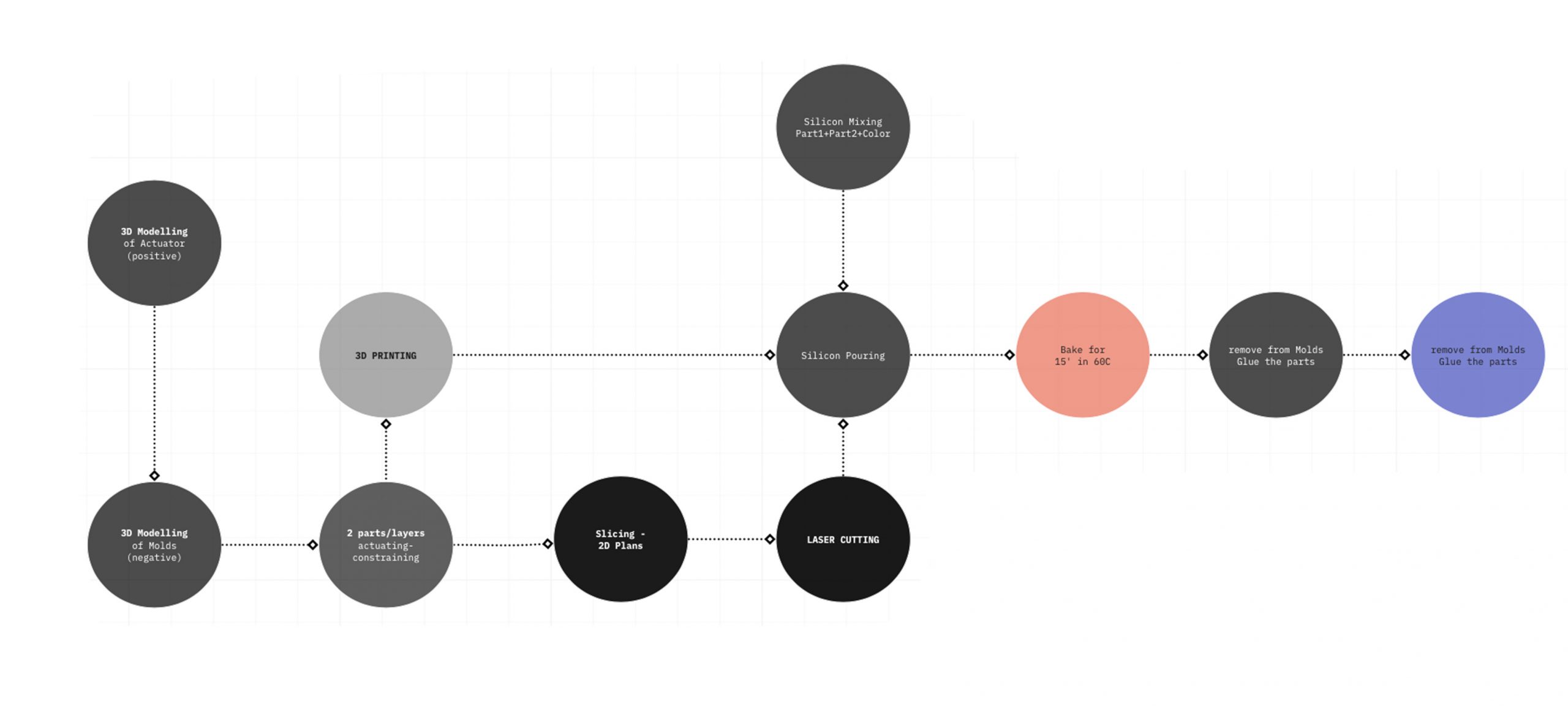
Mechanism Overview:
Control Manipulation:

Interaction Demonstration: https://drive.google.com/drive/folders/1ldiV7o1EZ_QfcC9cEiDaGpcplat2HtpA?usp=sharing
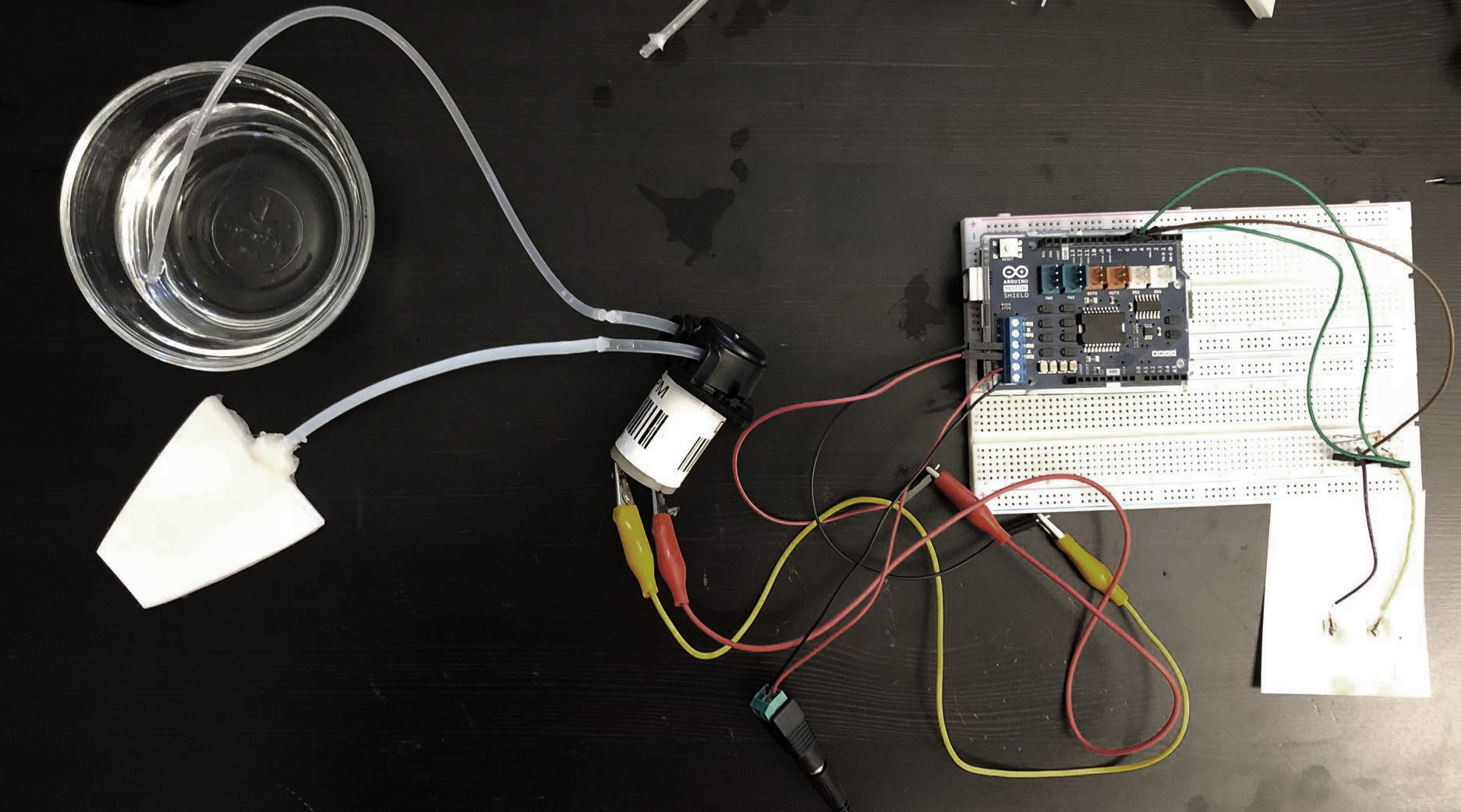
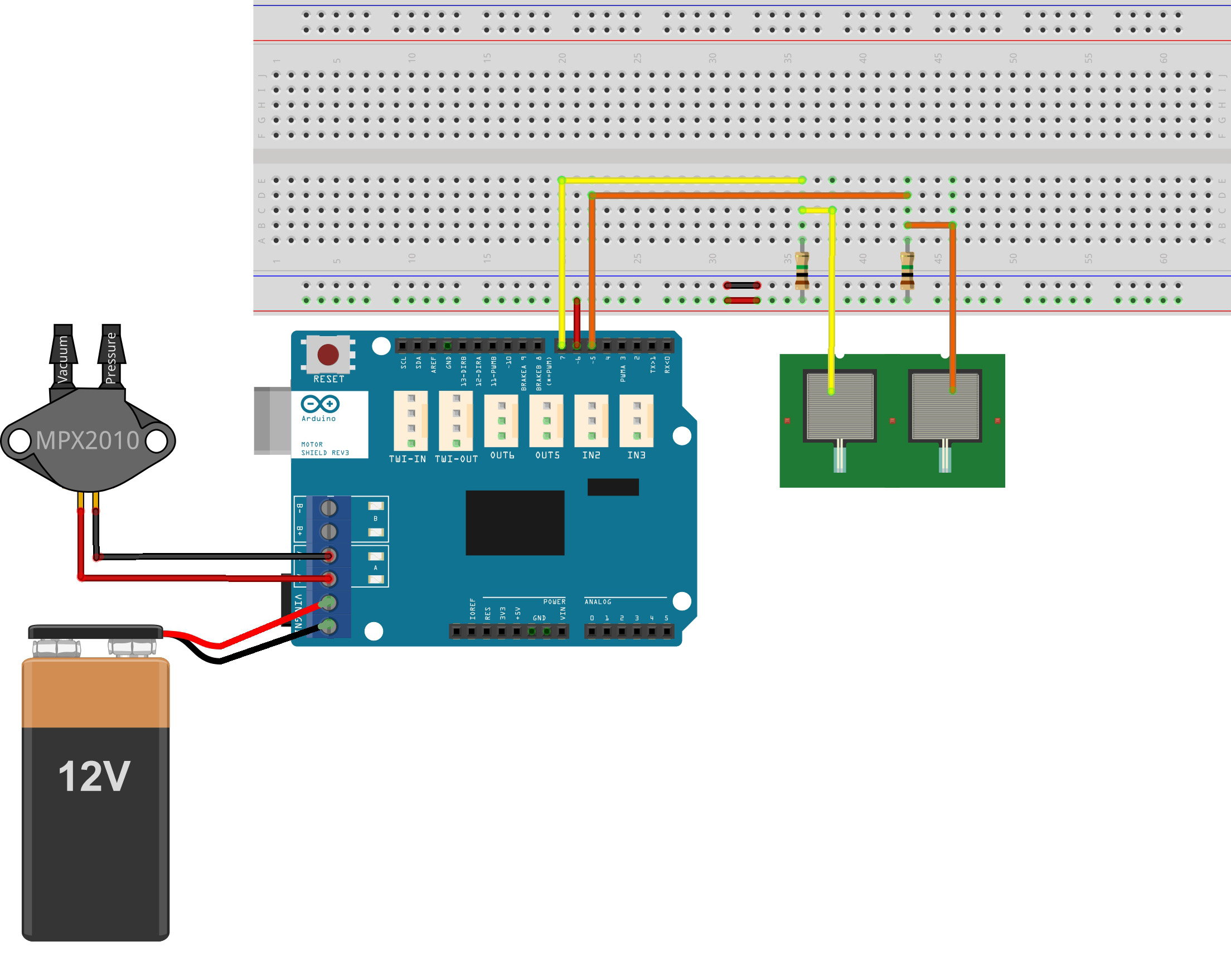
Arduino + Motor Shield REV3
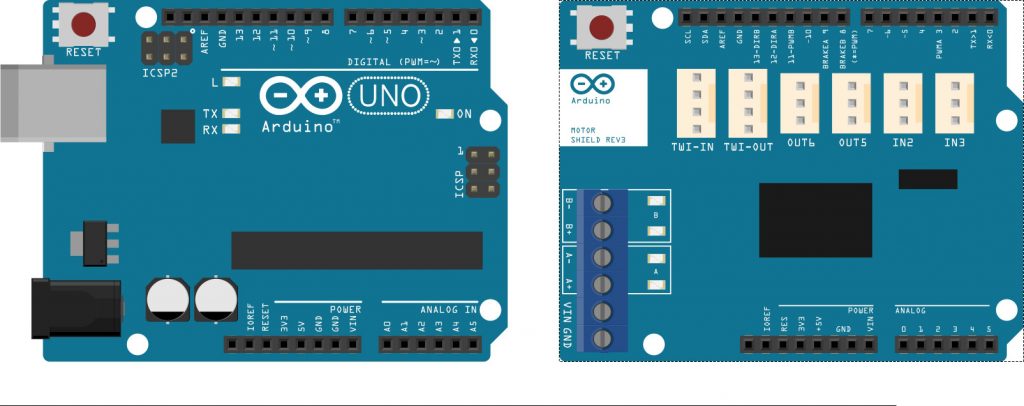
Arduino Wiring:
-Copper tape for the two capacitive sensors
-Peristaltic liquid pump
Arduino Code:
# include <CapacitiveSensor.h>
// Capacitive Sensors
CapacitiveSensor csLeft = CapacitiveSensor(6, 7);
bool csLeftTouched = true;
long csLeftVal;
CapacitiveSensor csRight = CapacitiveSensor(6, 5);
bool csRightTouched = true;
long csRightVal;
// water pump
const int pumpPin = 13; const int speedPin = 11; const int brakePin = 8;
const int cw = HIGH;
const int ccw = LOW;
void setup() {
//Serial.begin(9600);
pinMode(pumpPin, OUTPUT); pinMode(speedPin, OUTPUT); pinMode(brakePin, OUTPUT);
}
void loop() {
capacitiveSensorLeft();
capacitiveSensorRight();
activatePump();
}
void capacitiveSensorLeft() {
csLeftVal = csLeft.capacitiveSensor(80); // 80: resolution
if (csLeftVal > 1000) {
csLeftTouched = true;
//Serial.println("left on");
} else if (csLeftVal < 100) {
csLeftTouched = false;
//Serial.println("left off");
}
}
void capacitiveSensorRight() {
csRightVal = csRight.capacitiveSensor(80); // resolution
if (csRightVal > 1000) {
csRightTouched = true;
//Serial.println("right on");
} else if (csRightVal < 100) {
csRightTouched = false;
//Serial.println("right off");
}
}
void activatePump() {
while (csRightTouched == false && csLeftTouched == false) {
digitalWrite(brakePin, HIGH);
}
while (csRightTouched == true && csLeftTouched == false) {
digitalWrite(brakePin, LOW);
digitalWrite(pumpPin, cw);
analogWrite(speedPin, 200); // 200 is the rotation speed
}
while (csRightTouched == false && csLeftTouched == true) {
digitalWrite(brakePin, LOW);
digitalWrite(pumpPin, ccw);
analogWrite(speedPin, 200); // 200 is the rotation speed
}
}