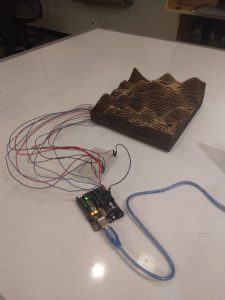
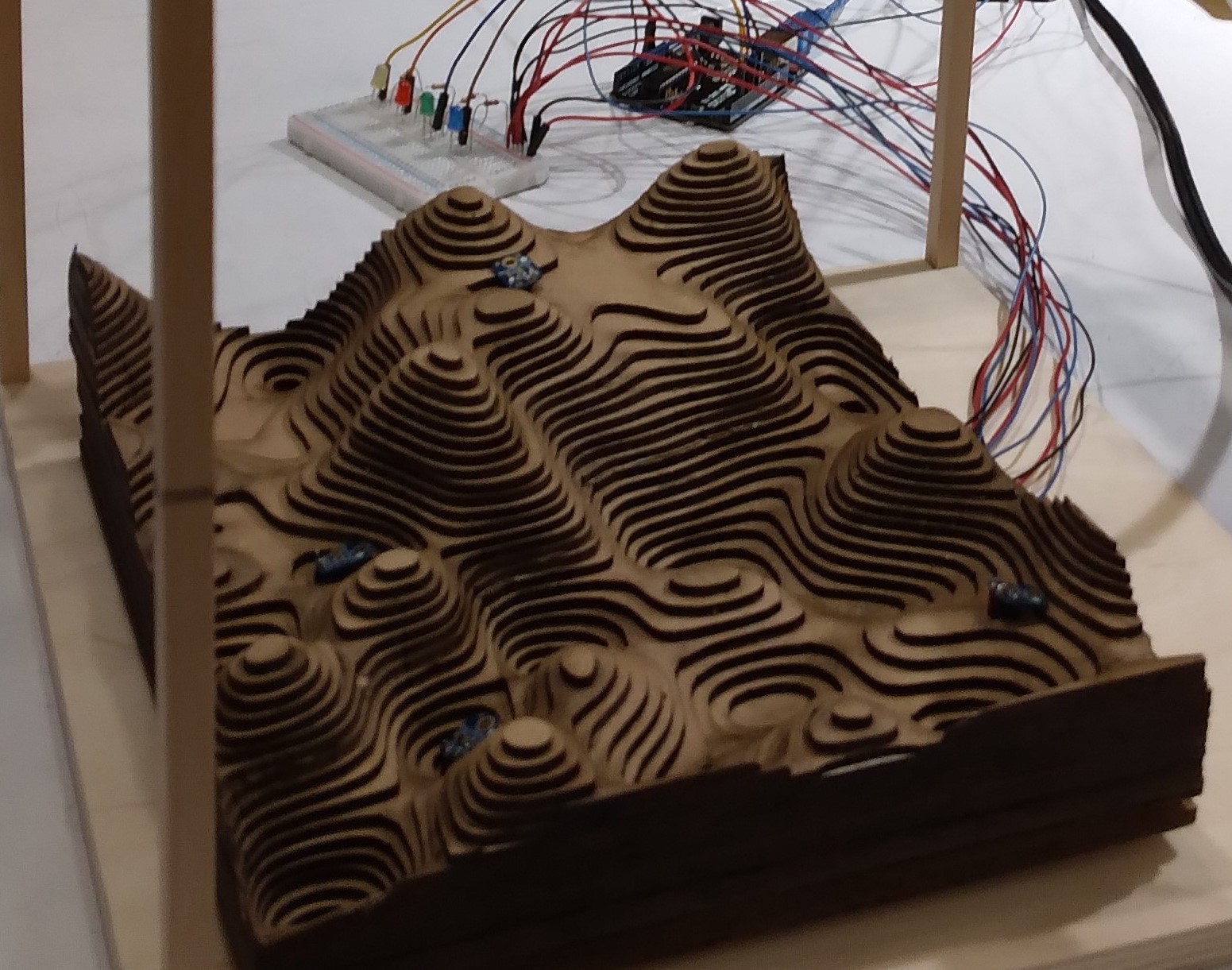
For the final project, I installed light sensors and ultrasonic sensors in and around a lasercut chipboard topography model to achieve several different objectives.
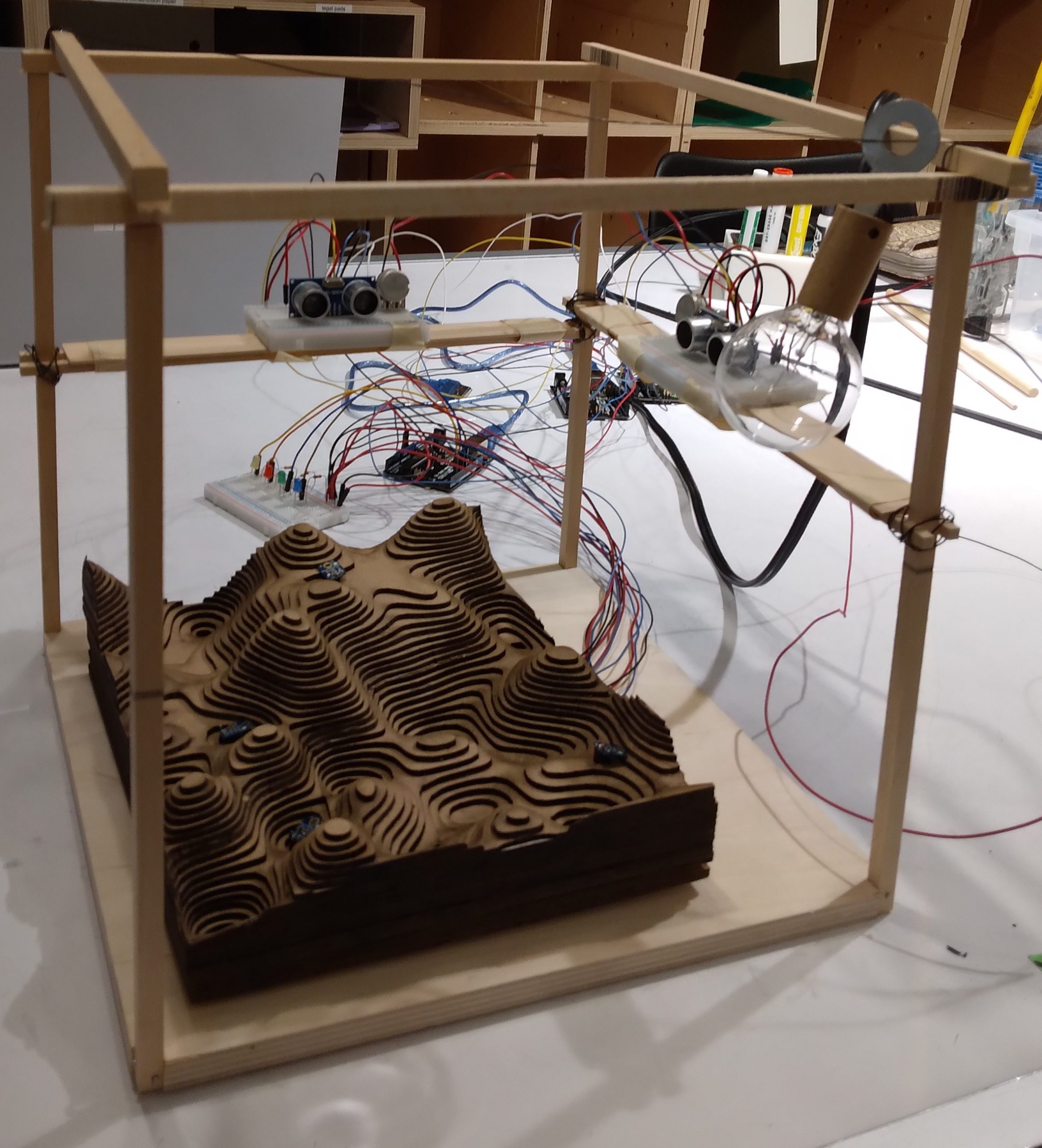
My final project consists of 4 parts:
- Visualizing Light Sensor Data on a Digital Model
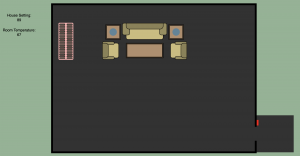
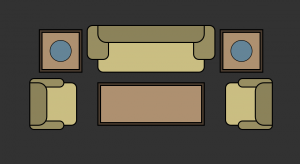
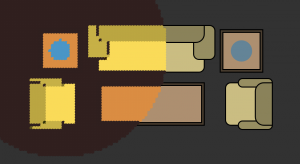
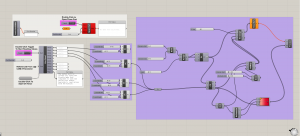
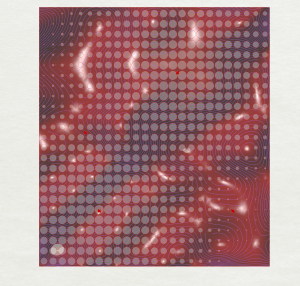
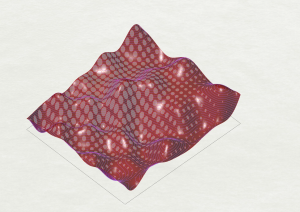
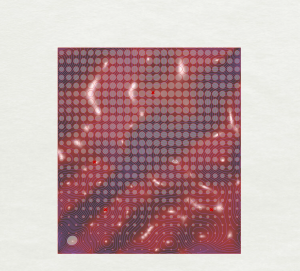
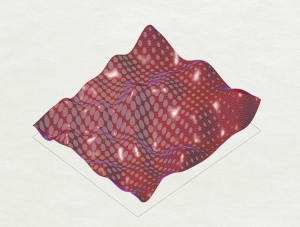
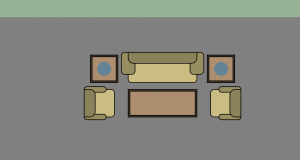
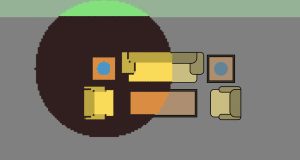
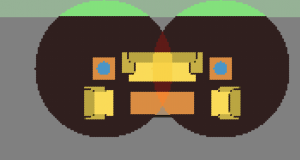
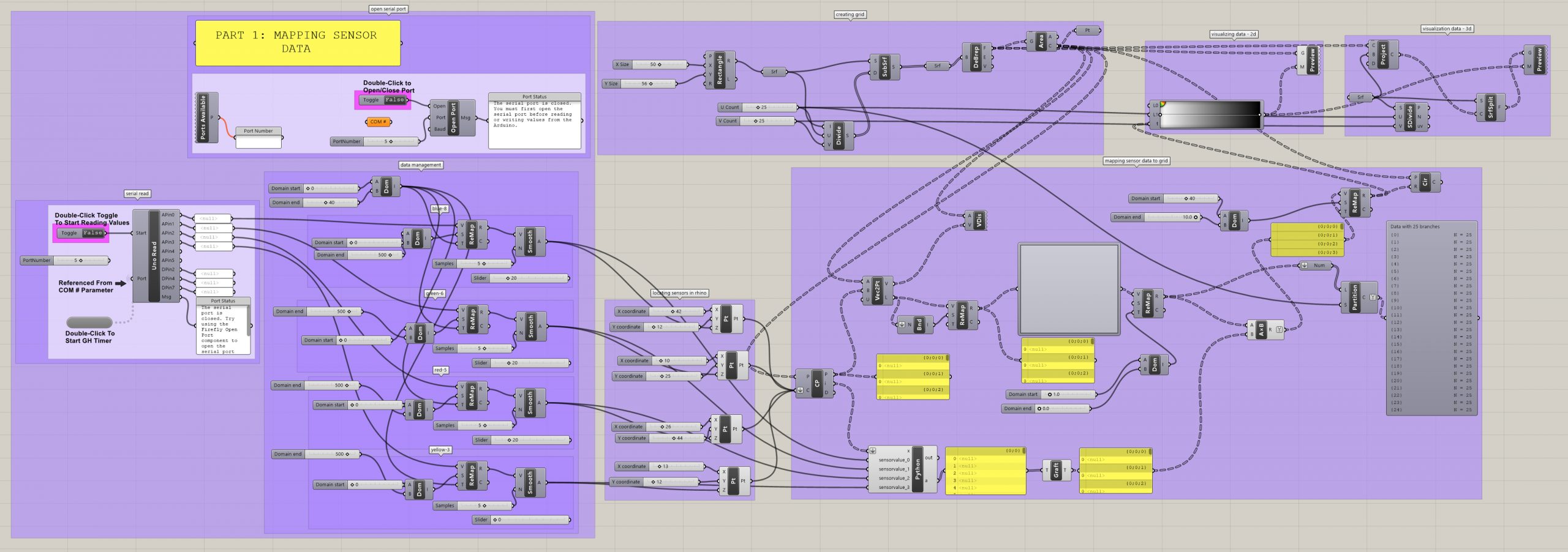
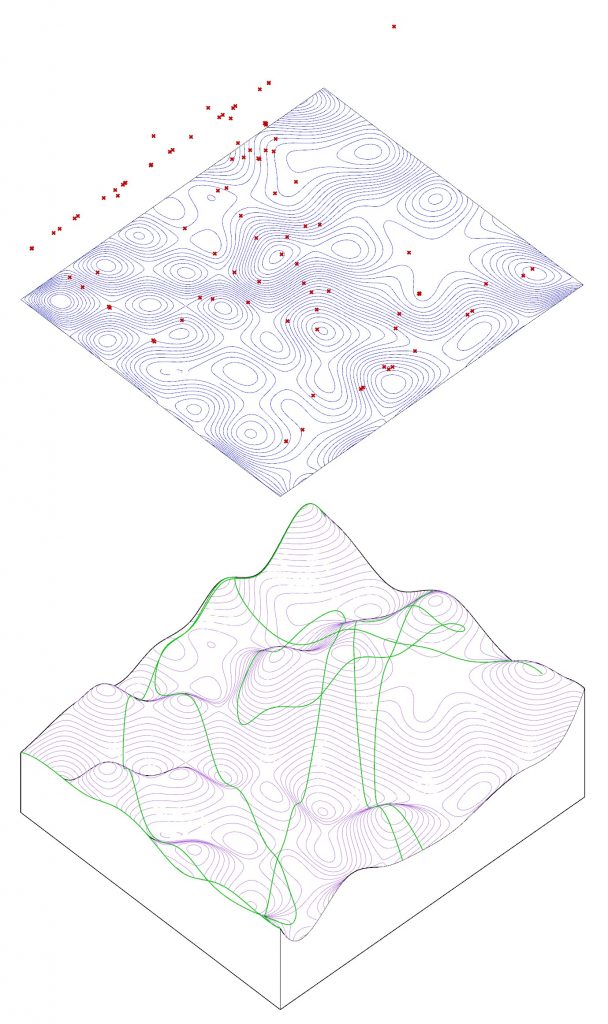
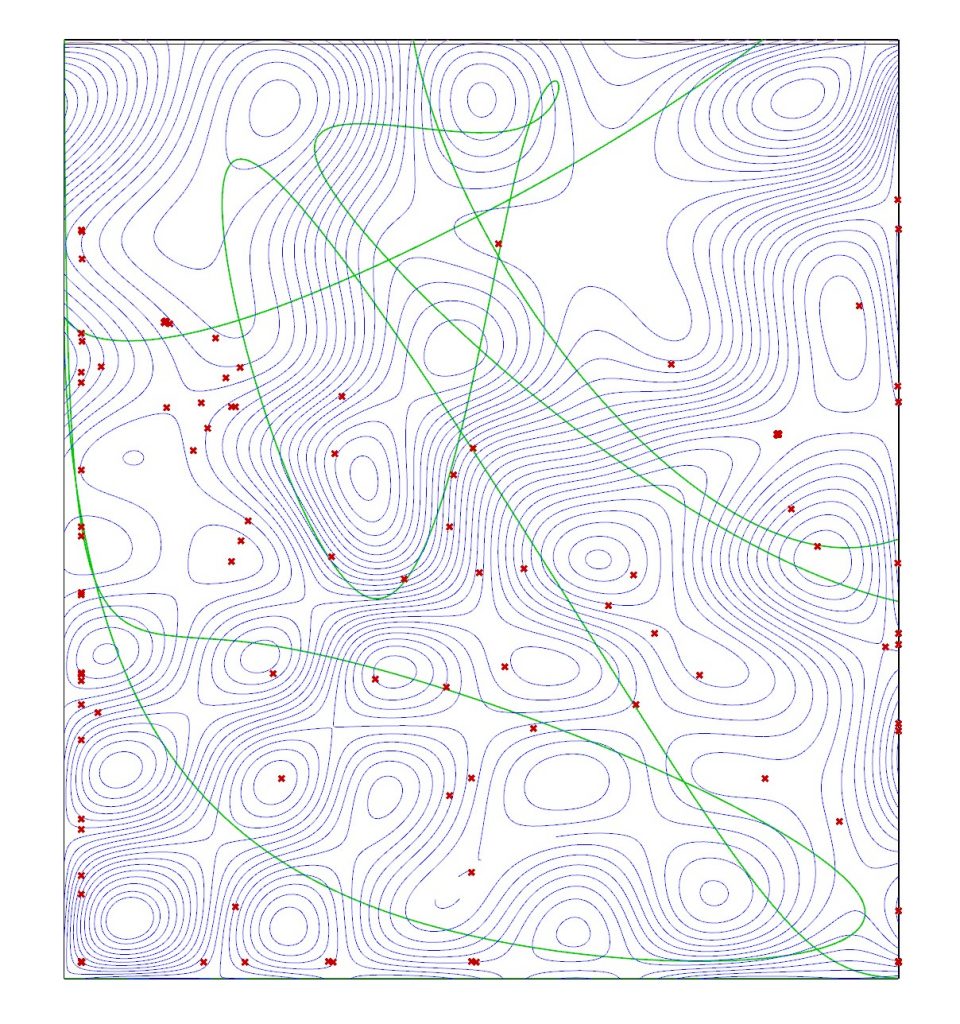
This exercise builds on previous work in the visual crit, in which data coming from light sensors influenced the visual patterns of the topography model in Rhino. In this version, light sensor data is used to create a gradient from white to black in Rhino/Grasshopper, which can either be viewed as a plan in 2d, or projected over the digital topography surface to be viewed in 3d. The data has been smoothed and remapped over a cellular grid, with data points mapped onto the digital topography model to correspond with the locations of the sensors on the physical model.
Views of 2d and 3d visualizations of the light gradient below:
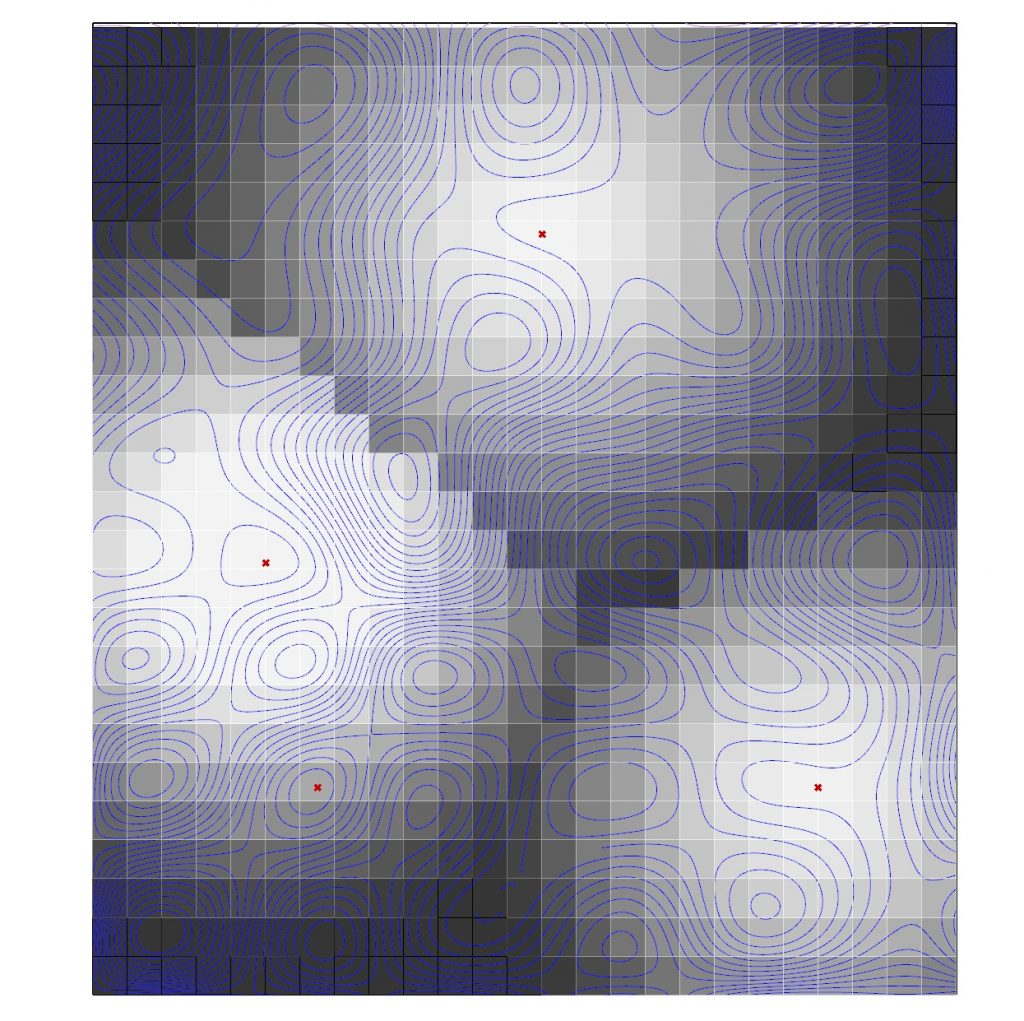
Demonstration of 2d visualization of light sensor data below:
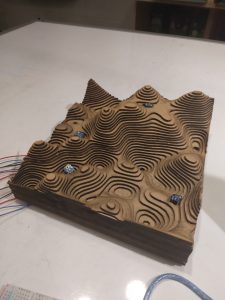
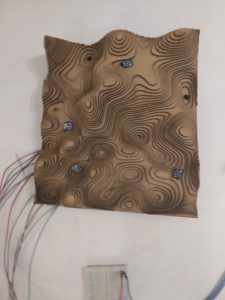
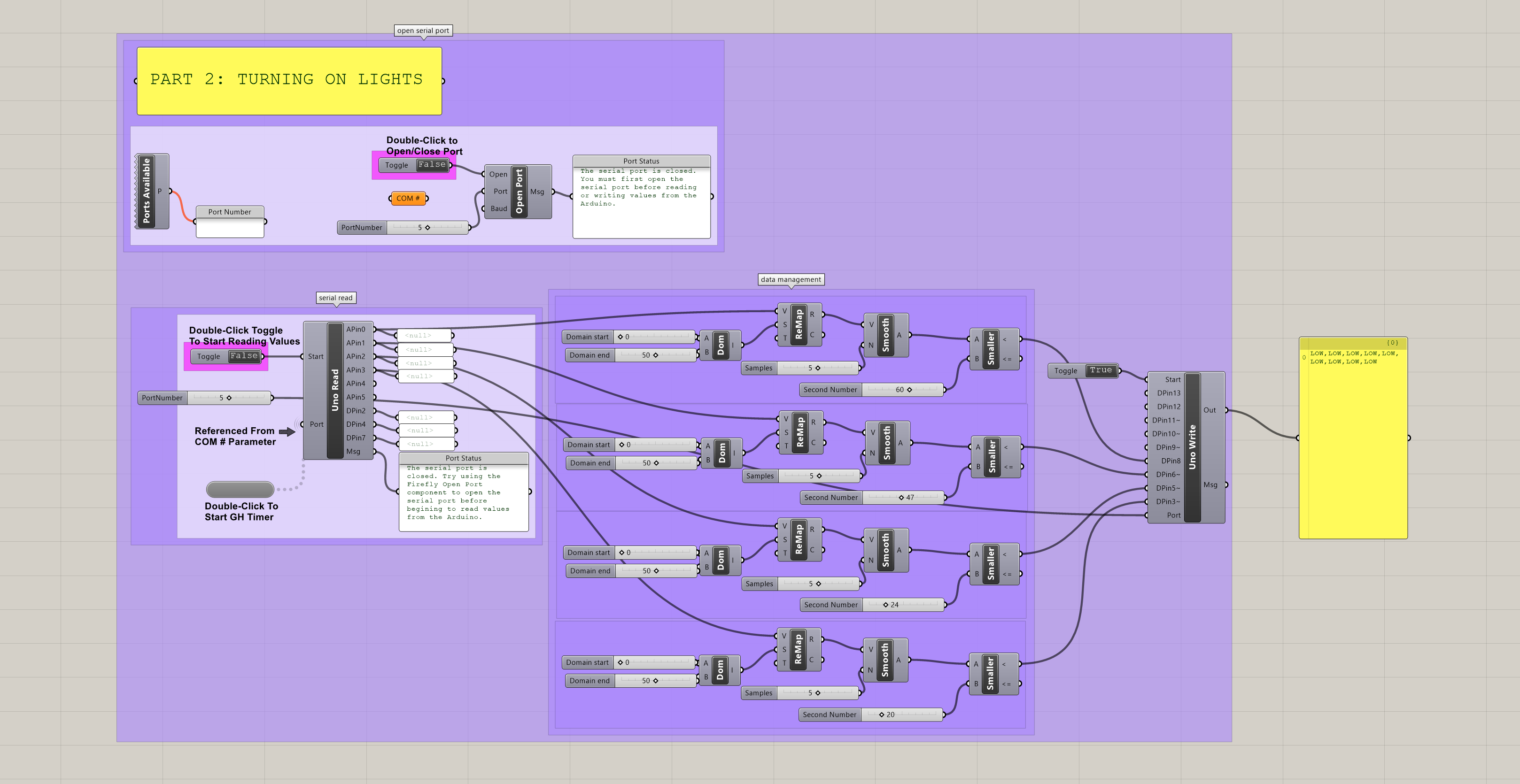
2. Turning LED Lights on Below a Given Light Level
When one of the light sensors falls below a certain threshold of light, the code shown below in Grasshopper will turn on the LED light corresponding to that particular sensor. When the light sensor value rises above this threshold, the LED light turns off. Depending on the way light is cast across the physical topography, one light may be turned on due to the surrounding low light levels, while the others are off. In this way, additional light is only provided when it is deemed necessary, based on the surrounding light conditions.
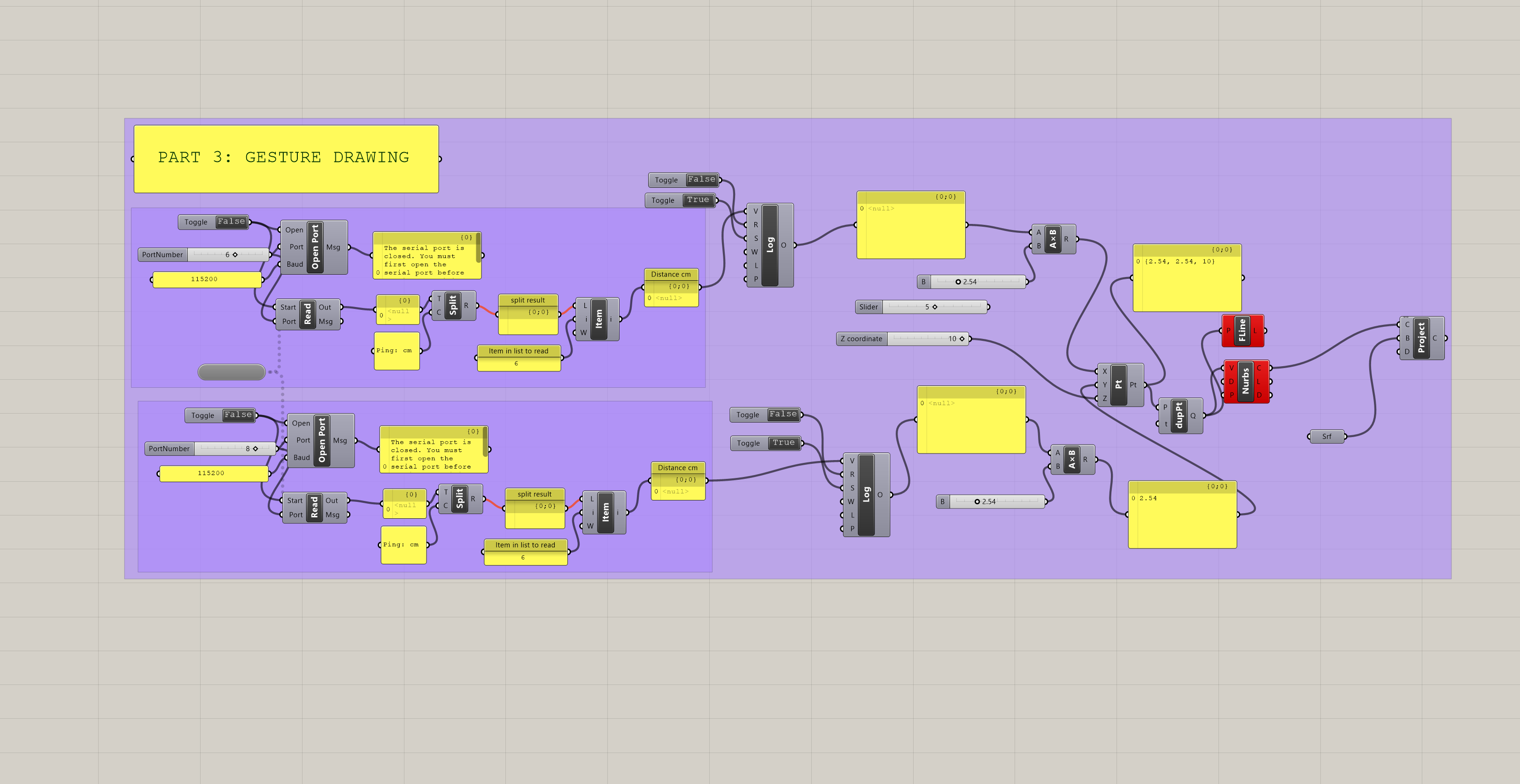
3. Digital Drawing with Ultrasonic Sensors
Using ultrasonic sensors mounted above the topography model, a pointer (such as a long dowel rod) can be moved across the physical terrain of the model. As the ultrasonic sensors pick up the location of the dowel, these locations are read in Grasshopper, logged, and construct points across the digital Rhino model, which can then be used to generate linework. One of the challenges with this project is the limited peripheral detection abilities of the ultrasonic sensors. Two were used in this demonstration, and when the dowel rod moved out of the range of one of the sensors, the code would interpret the coordinates in this area as “0” and the points and associated linework will “jump” to the edges of the model. One possible remedy would be to remove coordinates with “0” from the log, but this would not resolve the sensor range issue. Another possible solution could be to add more sensors. This would likely require multiple Arduinos, unless more complicated Arduino code could be developed to handle multiple ultrasonic sensors at a time (my preliminary attempts to combine 2 ultrasonic sensors on one Arduino were unsuccessful).
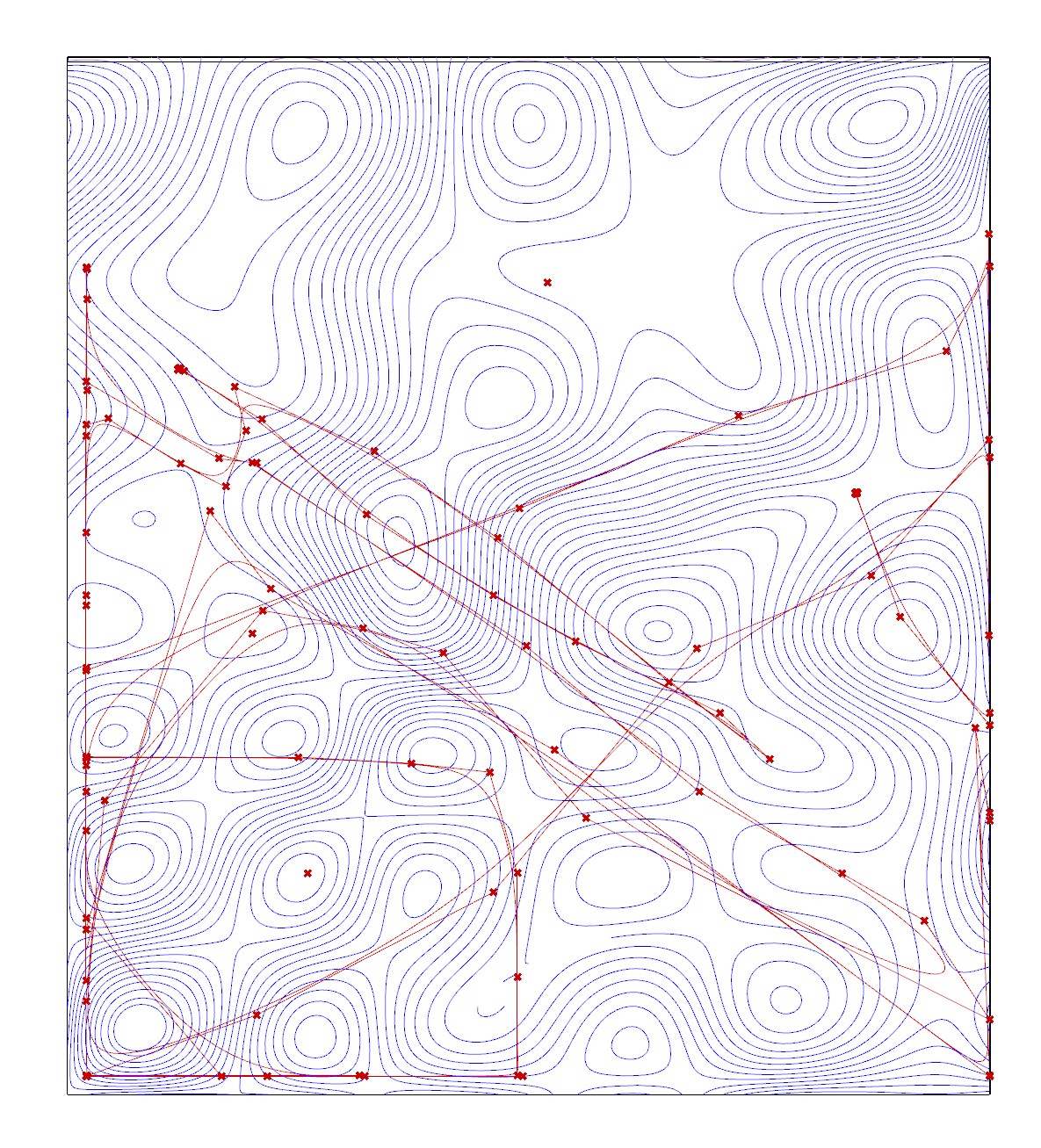
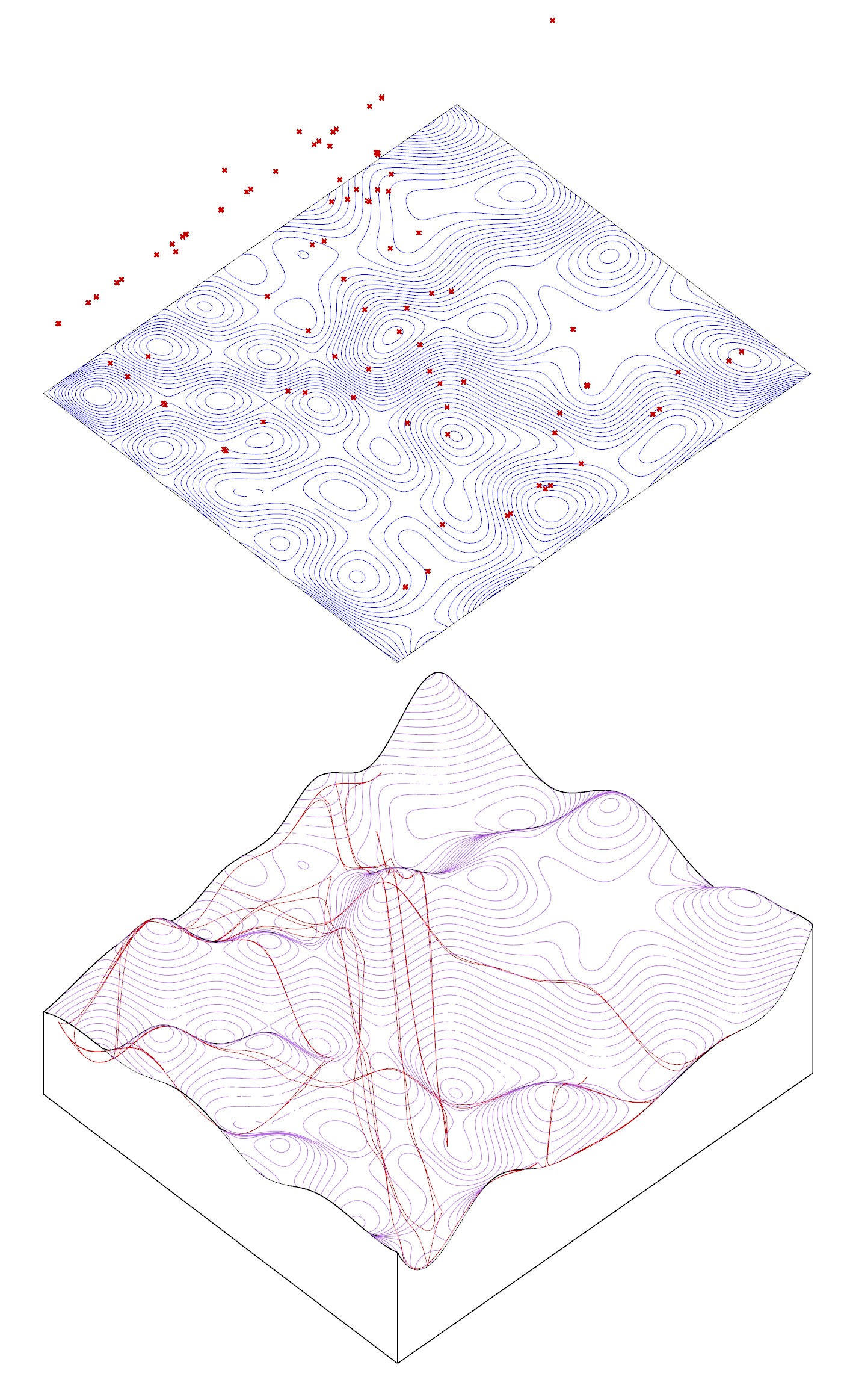
4. Digital Drawing with Potentiometers
To explore a second technique for digital drawing, I used potentiometers to guide the drawing across the physical model. This method allowed for greater range and control over the digital drawing (provided one is accustomed to the controls), but it is less intuitive than gesturing with a dowel rod.
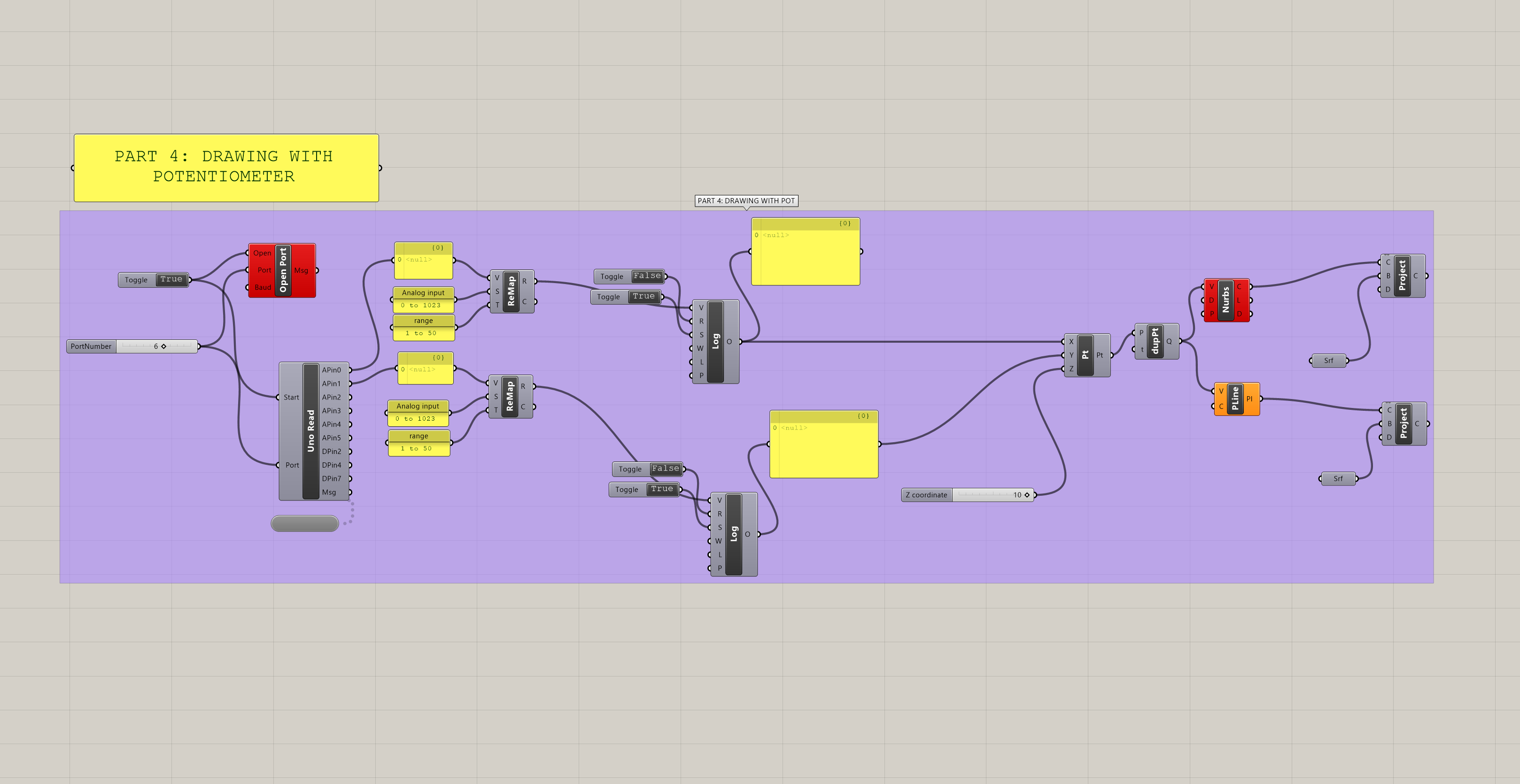
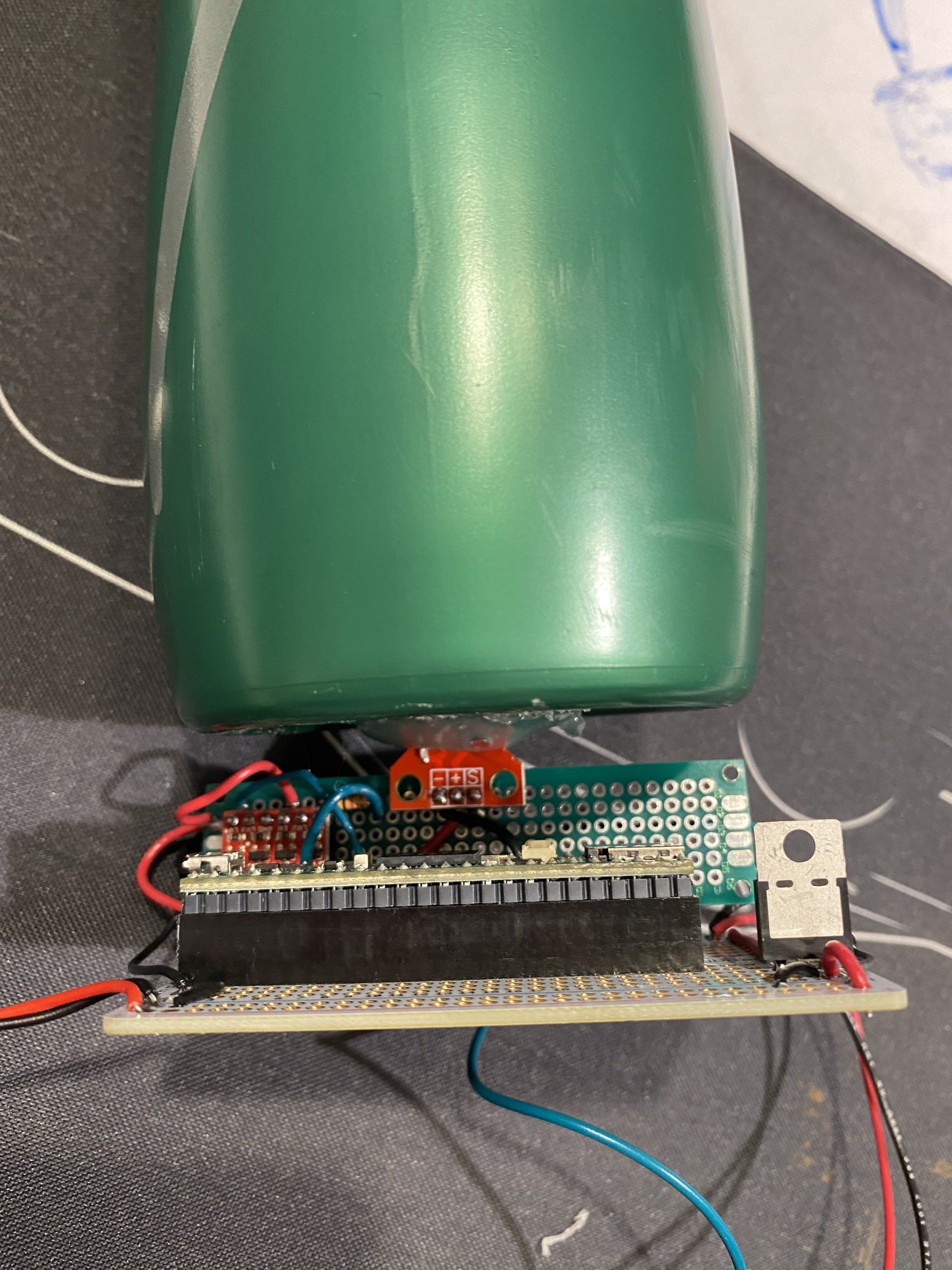
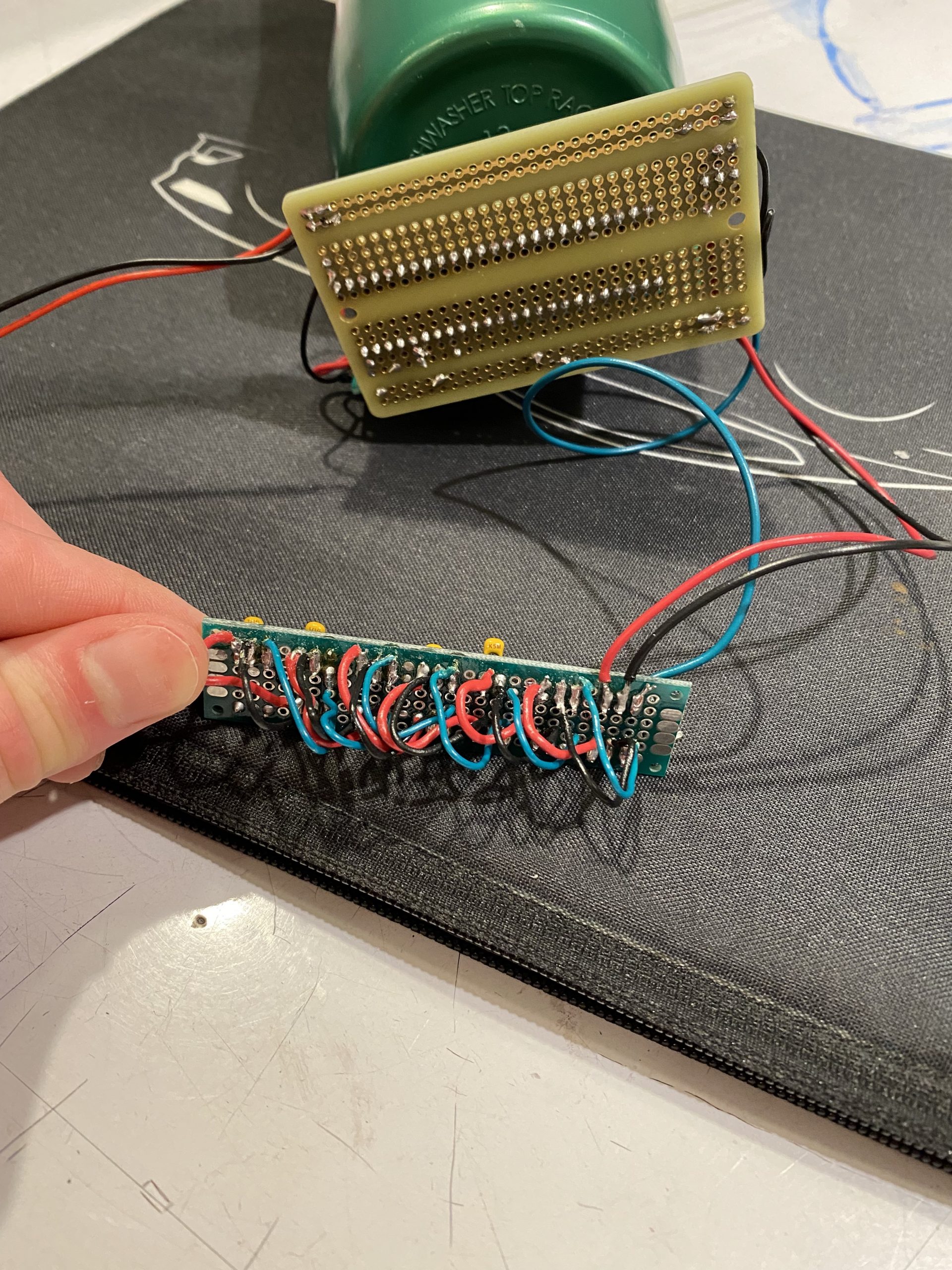
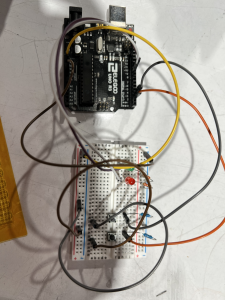
The Arduino set up for the light sensors and the potentiometer uses Firmata, written by Andrew Payne and Jason Kelly Johnson to facilitate communication between the Arduino and Rhino/Grasshopper/Firefly. A modification is required for 2022 Arduino:
/*
Created by Andrew Payne and Jason Kelly Johnson
Latest Update March 25th, 2015
Copyright 2015 | All Rights Reserved
version below modified for 2022 Arduino
This Firmata allows you to control an Arduino board from Rhino/Grasshopper/Firefly.
Updates, Questions, Suggestions visit: http://www.fireflyexperiments.com
1. Plug Arduino boards into your USB port; confirm that your Arduino's green power LED in on
2. Select your specific Arduino Board and Serial Port (Tools > Board; Tools > Serial Port) *Take note of your Serial Port COM #
3. Verify (play button) and Upload (upload button) this program to your Arduino, close the Arduino program
4. then open ... Rhino/Grasshopper/Firefly
Note: The Firefly Firmata sets the following pins to perform these functions:
*****ON STANDARD BOARDS (ie. Uno, Diecimila, Duemilanove, Lillypad, Mini, etc.)*****
ANALOG IN pins 0-5 are set to return values (from 0 to 1023) for analog sensors
DIGITAL IN pins 2,4,7 will return 0's or 1's; for 3 potential digital sensors (buttons, switches, on/off, true/false, etc.)
DIGITAL/ANALOG OUT pins 3,5,6,11 (marked with a ~) can be used to digitalWrite, analogWrite, or Servo.write depending on the input status of that Firefly pin
DIGITAL OUT pins 8,9,10,12,13 can be used to digitalWrite, Servo.write, or analogWrite depending on the input status of that Firefly pin
*****ON MEGA BOARDS (ie. ATMEGA1280, ATMEGA2560)*****
ANALOG IN pins 0-15 will return values (from 0 to 1023) for 16 analog sensors
DIGITAL IN pins 22-31 will return 0's or 1's; for digital sensors (buttons, switches, on/off, true/false, etc.)
DIGITAL/ANALOG OUT pins 2-13 can be used to digitalWrite, analogWrite, or Servo.write depending on the input status of that Firefly pin
DIGITAL OUT pins 32-53 can be used to digitalWrite, Servo.write, or analogWrite depending on the input status of that Firefly pin
*****ON LEONARDO BOARDS*****
ANALOG IN pins 0-5 are set to return values (from 0 to 1023) for analog sensors
DIGITAL IN pins 2,4,7 will return 0's or 1's; for 3 potential digital sensors (buttons, switches, on/off, true/false, etc.)
DIGITAL/ANALOG OUT pins 3,5,6,11 (marked with a ~) can be used to digitalWrite, analogWrite, or Servo.write depending on the input status of that Firefly pin
DIGITAL OUT pins 8,9,10,12,13 can be used to digitalWrite, Servo.write, or analogWrite depending on the input status of that Firefly pin
*****ON DUE BOARDS (ie. SAM3X8E)*****
ANALOG IN pins 0-11 will return values (from 0 to 4095) for 12 analog sensors
DIGITAL IN pins 22-31 will return 0's or 1's; for digital sensors (buttons, switches, on/off, true/false, etc.)
DIGITAL/ANALOG OUT pins 2-13 can be used to digitalWrite, analogWrite, or Servo.write depending on the input status of that Firefly pin
DIGITAL OUT pins 32-53 can be used to digitalWrite, Servo.write, or analogWrite depending on the input status of that Firefly pin
DAC0 and DAC1 can be used to output an analog voltage on those pins (only available on DUE boards)
*/
#include <Servo.h> // attach Servo library (http://www.arduino.cc/playground/ComponentLib/Servo)
#include <pins_arduino.h> // attach arduino pins header file to determine which board type is being used
#define BAUDRATE 115200 // Set the Baud Rate to an appropriate speed
#define BUFFSIZE 512 // buffer one command at a time
/*==============================================================================
* GLOBAL VARIABLES
*============================================================================*/
char buffer[BUFFSIZE]; // declare buffer
uint8_t bufferidx = 0; // a type of unsigned integer of length 8 bits
char *parseptr;
char buffidx;
int counter = 0;
int numcycles = 1000;
#if defined(__AVR_ATmega328P__) || defined(__AVR_ATmega168__) // declare variables for STANDARD boards
Servo Servo13, Servo12, Servo11, Servo10, Servo9, Servo8, Servo6, Servo5, Servo3;
Servo SERVO_CONFIG[] = {Servo13, Servo12, Servo11, Servo10, Servo9, Servo8, Servo6, Servo5, Servo3}; // declare array of Servo objects
int WRITE_PIN_CONFIG[] = {13,12,11,10,9,8,6,5,3};
int READ_APIN_CONFIG[] = {0,1,2,3,4,5};
int READ_DPIN_CONFIG[] = {2,4,7};
#endif
#if defined(__AVR_ATmega32U4__) || defined(__AVR_ATmega16U4__) // declare variables for LEONARDO board
Servo Servo13, Servo12, Servo11, Servo10, Servo9, Servo8, Servo6, Servo5, Servo3;
Servo SERVO_CONFIG[] = {Servo13, Servo12, Servo11, Servo10, Servo9, Servo8, Servo6, Servo5, Servo3}; // declare array of Servo objects
int WRITE_PIN_CONFIG[] = {13,12,11,10,9,8,6,5,3};
int READ_APIN_CONFIG[] = {0,1,2,3,4,5};
int READ_DPIN_CONFIG[] = {2,4,7};
#endif
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) // declare variables for MEGA boards
Servo Servo2, Servo3, Servo4, Servo5, Servo6, Servo7, Servo8, Servo9, Servo10, Servo11, Servo12, Servo13, Servo32, Servo33, Servo34, Servo35, Servo36, Servo37, Servo38, Servo39, Servo40, Servo41, Servo42, Servo43, Servo44, Servo45, Servo46, Servo47, Servo48, Servo49, Servo50, Servo51, Servo52, Servo53;
Servo SERVO_CONFIG[] = {Servo2, Servo3, Servo4, Servo5, Servo6, Servo7, Servo8, Servo9, Servo10, Servo11, Servo12, Servo13, Servo32, Servo33, Servo34, Servo35, Servo36, Servo37, Servo38, Servo39, Servo40, Servo41, Servo42, Servo43, Servo44, Servo45, Servo46, Servo47, Servo48, Servo49, Servo50, Servo51, Servo52, Servo53}; // declare array of Servo objects
int WRITE_PIN_CONFIG[] = {2,3,4,5,6,7,8,9,10,11,12,13,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53};
int READ_APIN_CONFIG[] = {0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15};
int READ_DPIN_CONFIG[] = {22,23,24,25,26,27,28,29,30,31};
#endif
#if defined(__SAM3X8E__) // declare variables for DUE boards
Servo FDAC0, FDAC1, Servo2, Servo3, Servo4, Servo5, Servo6, Servo7, Servo8, Servo9, Servo10, Servo11, Servo12, Servo13, Servo32, Servo33, Servo34, Servo35, Servo36, Servo37, Servo38, Servo39, Servo40, Servo41, Servo42, Servo43, Servo44, Servo45, Servo46, Servo47, Servo48, Servo49, Servo50, Servo51, Servo52, Servo53;
Servo SERVO_CONFIG[] = {FDAC0, FDAC1, Servo2, Servo3, Servo4, Servo5, Servo6, Servo7, Servo8, Servo9, Servo10, Servo11, Servo12, Servo13, Servo32, Servo33, Servo34, Servo35, Servo36, Servo37, Servo38, Servo39, Servo40, Servo41, Servo42, Servo43, Servo44, Servo45, Servo46, Servo47, Servo48, Servo49, Servo50, Servo51, Servo52, Servo53}; // declare array of Servo objects
int WRITE_PIN_CONFIG[] = {0,1,2,3,4,5,6,7,8,9,10,11,12,13,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53}; //Note: first two values correspond to the DAC pins
int READ_APIN_CONFIG[] = {0,1,2,3,4,5,6,7,8,9,10,11};
int READ_DPIN_CONFIG[] = {22,23,24,25,26,27,28,29,30,31};
#endif
/*==============================================================================
* SETUP() This code runs once
*============================================================================*/
void setup()
{
Init(); //set initial pinmodes
Serial.begin(BAUDRATE); // Start Serial communication
#if defined(__SAM3X8E__) //if the connected board is an Arduino DUE
analogReadResolution(12); //Set the analog read resolution to 12 bits (acceptable values between 1-32 bits). This is only for DUE boards
analogWriteResolution(12); // Set the analog write resolution to 12 bits (acceptable values between 1-32 bits). This is only for DUE boards
#endif
}
/*==============================================================================
* LOOP() This code loops
*============================================================================*/
void loop()
{
if(Serial){
ReadSerial(); // read and parse string from serial port and write to pins
if (counter >= numcycles){ // Wait every nth loop
ReadInputs(); // get input data and print data to the serial port
counter = 0; // reset the counter
}
counter ++; // increment the writecounter
}
}
/*==============================================================================
* FUNCTIONS()
*============================================================================*/
/*
* Initializes the digital pins which will be used as inputs
*/
void Init(){
int len = sizeof(READ_DPIN_CONFIG)/sizeof(READ_DPIN_CONFIG[0]); //get the size of the array
for(int i = 0; i < len; i++){
pinMode(READ_DPIN_CONFIG[i], INPUT);
}
}
/*
* Reads the incoming ADC or digital values from the corresponding analog and digital input
* pins and prints the value to the serial port as a formatted commma separated string
*/
void ReadInputs(){
int len = sizeof(READ_APIN_CONFIG)/sizeof(READ_APIN_CONFIG[0]); //get the size of the array
for(int i = 0; i < len; i++){
int val = analogRead(READ_APIN_CONFIG[i]); //read value from analog pins
Serial.print(val); Serial.print(",");
}
len = sizeof(READ_DPIN_CONFIG)/sizeof(READ_DPIN_CONFIG[0]); //get the size of the array
for(int i = 0; i < len; i++){
int val = digitalRead(READ_DPIN_CONFIG[i]); //read value from digital pins
Serial.print(val); Serial.print(",");
}
Serial.println("eol"); //end of line marker
}
/*
* Retrieve the latest incoming serial value and split the string at the comma delimeter.
* When a comma is found, the value is offloaded to a temporary variable and written
* to the corresponding digital pin.
*/
void ReadSerial(){
char c; // holds one character from the serial port
if (Serial.available()) {
c = Serial.read(); // read one character
buffer[bufferidx] = c; // add to buffer
if (c == '\n') {
buffer[bufferidx+1] = 0; // terminate it
parseptr = buffer; // offload the buffer into temp variable
int len = sizeof(WRITE_PIN_CONFIG)/sizeof(WRITE_PIN_CONFIG[0]); //get the size of the array
for(int i = 0; i < len; i++){
//parse all incoming values and assign them to the appropriate variable
int val = parsedecimal(parseptr); // parse the incoming number
if(i != len - 1) parseptr = strchr(parseptr, ',')+1; // move past the ","
WriteToPin(WRITE_PIN_CONFIG[i], val, SERVO_CONFIG[i]); //send value out to pin on arduino board
}
bufferidx = 0; // reset the buffer for the next read
return; // return so that we don't trigger the index increment below
} // didn't get newline, need to read more from the buffer
bufferidx++; // increment the index for the next character
if (bufferidx == BUFFSIZE-1) bufferidx = 0; // if we get to the end of the buffer reset for safety
}
}
/*
* Send the incoming value to the appropriate pin using pre-defined logic (ie. digital, analog, or servo)
*/
void WriteToPin(int _pin, int _value, Servo _servo){
if (_value >= 10000 && _value < 20000) // check if value should be used for Digital Write (HIGH/LOW)
{
if (_servo.attached()) _servo.detach(); // detach servo is one is attached to pin
pinMode(_pin, OUTPUT);
_value -= 10000; // subtract 10,000 from the value sent from Grasshopper
if (_value == 1) digitalWrite(_pin, HIGH);
else digitalWrite(_pin, LOW);
}
else if (_value >= 20000 && _value < 30000) // check if value should be used for Analog Write (0-255)
{
if (_servo.attached()) _servo.detach(); // detach servo is one is attached to pin
pinMode(_pin, OUTPUT);
_value -= 20000; // subtract 20,000 from the value sent from Grasshopper
analogWrite(_pin, _value);
}
else if (_value >= 30000 && _value < 40000) // check if value should be used for Servo Write (0-180)
{
_value -= 30000; // subtract 30,000 from the value sent from Grasshopper
if (!_servo.attached())_servo.attach(_pin); // attaches a Servo to the PWM pin (180 degree standard servos)
_servo.write(_value);
}
else if (_value >= 40000 && _value < 50000) // check if value should be used for Analog Write (0-4096) for DACs
{
if (_servo.attached()) _servo.detach(); // detach servo is one is attached to pin
pinMode(_pin, OUTPUT);
_value -= 40000; // subtract 40,000 from the value sent from Grasshopper
WriteToDAC(_pin, _value);
}
}
/*
* Parse a string value as a decimal
*/
uint32_t parsedecimal(char *str){
uint32_t d = 0;
while (str[0] != 0) {
if ((str[0] > '50') || (str[0] < '0'))
return d;
d *= 10;
d += str[0] - '0';
str++;
}
return d;
}
/*
* Send the incoming value to the appropriate DAC for DUE boards.
* Note: analogWrite resolution (default is 12 bits) is defined in the Setup function.
*/
//modification to original sketch to work with 2022 firefly and arduino
void WriteToDAC(int _pin, int _value){
#if defined(__SAM3X8E__)
if(_pin == 0) analogWrite(DAC0, _value);
else if (_pin == 1) analogWrite(DAC1, _value);
#endif
}
To use the ultrasonic sensors with Rhino/Grasshopper/Firefly, the NewPing library was used:
// ---------------------------------------------------------------------------
// Example NewPing library sketch that does a ping about 20 times per second.
// ---------------------------------------------------------------------------
#include <NewPing.h>
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 30 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
}
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
Serial.print("Ping: ");
Serial.print(sonar.ping_cm()); // Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println("cm");
}