Experiment details: As we previously mentioned, we are planning to work with a system of manual pumps and soft actuated parts connected through tubes to make the parts move. Before testing the viability of the modularity, we wanted to make sure the base of the system is viable. This will be through testing how effective
Continue reading Sebastian and Elena: Bill of Materials
Clarifying Research Scope
Project synopsis We are making a themed children’s fabric book with soft sensors to create an interactive playful experience. By adding digital interactive elements to the fabric book, we hope to explore innovative ways of letting young children to learn and practice skills through tactile experiences with the help of soft electronics. The fabric book
Continue reading Clarifying Research Scope
Exercise: Clarifying Research Scope
Introduction We are creating an interactive DIY book for teenagers and adults with self-folding/actuating origami pages that aid the reader’s process of making. Our overarching goal is to accommodate a hands-on learning style by making it easier to visualize through tactile experiences. For example, a lesson in the book could be an “introduction to circuits
Continue reading Exercise: Clarifying Research Scope
Clarifying Research Scope | Elena and Sebastian
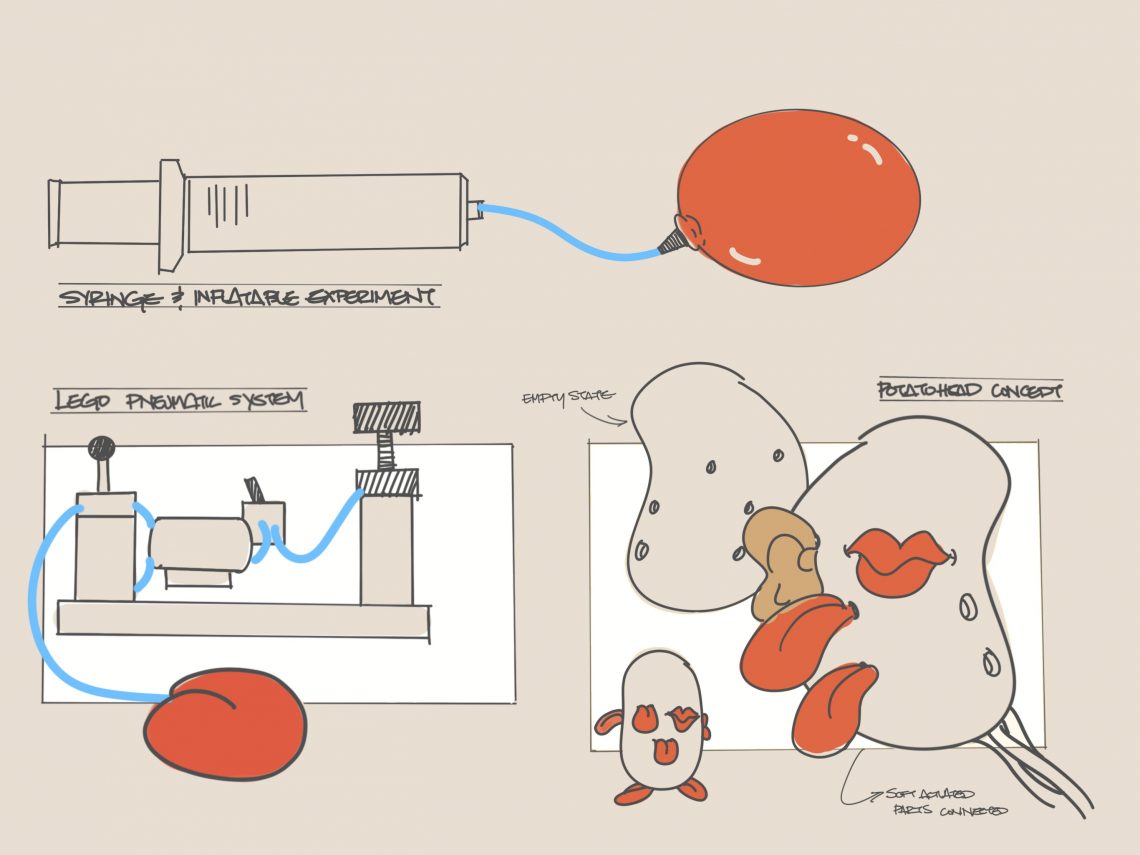
We are looking to create a building toy that helps young people learn basic principles of soft actuators. This building toy will likely consist of a kit of soft parts, loosely inspired by parts of the human body or other animals, actuated with a simple air pump. These parts will be compatible with an already
Continue reading Clarifying Research Scope | Elena and Sebastian
Research Study B
I propose a project with soft actuators that manipulate lenses for human vision. The bending of the actuators is determined by gestures of the hands, which would comically mimic those used by phone devices. The goal is for the lenses to make us see our surroundings as if they were on a screen and to
Continue reading Research Study B
Research Part B
My project brief remains largely the same as before–to create a robot capable of licking lollipops in an eerily biomimetic manner, count those licks, and, before finishing the lollipop, biting the candy with a hidden jaw mechanism. The concept and background I discussed in the last post left a big technical hole: how to keep
Continue reading Research Part B
Exercise 8: Research Study B
Themes: Design and fabrication of soft textile based sensors Inspired by existing artworks of responsive and interactive spaces, I want to explore making soft interfaces with textile based materials and sensors. Instead of building the entire environment, I plan on creating smaller scale prototypes (could be in the form of swatches or interactive soft objects)
Continue reading Exercise 8: Research Study B
Research Study: B
Themes: Gestural Input, interpretation, collaboration(?) In this project, I want to explore the separation of body in space and how effectively can movements (both small, detail-oriented and grandiose) be translated by a machine to create art. I plan on using a soft sensing glove and a sponge ball along with a motion-tracking camera that targets
Continue reading Research Study: B
Research Study: Part B
I initially proposed the idea of a toolkit for children to introduce them to pneumatic soft robots, comprised of various materials and folding patterns. Based off of the reading, I have assigned the following changes to my initial proposal. The incorporation of sensing and input to produce a physical change, this could be controlled through
Continue reading Research Study: Part B
Research Study: B
Topic: fabrication methods for soft materials I propose a soft sculpture that explores the technique of Direct Ink Writing. Direct Ink writing is a method of 3D printing that is useful for multi-material prints and suitable for fabricating composites. This method can be used to embed thermochromic inks (color change from temperature change) into materials.
Continue reading Research Study: B