
Introduction: We are Team MARYa, (Mohan, Andrea, Roly, Yingyang) a group of four Carnegie Mellon University students taking an Introduction to Physical Computing course. For our final project,…

Automatic Ball Winder For the final project of Introduction to Physical Computing, The Weavers, which consists of Jenny, Megan, and Ghalya, were assigned to create an assistive device…

INTRODUCTION For this project, our group of three were tasked with creating a device that would help make the life of our older friend, Jim (as he prefers…
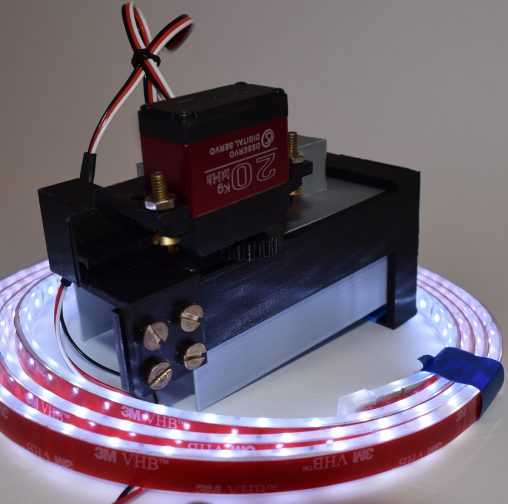
Project Description Joanne wanted to have control of her front yard lamp from inside her house. She also wanted her front steps to be better lit at night….

Introduction For our final project, our team worked with Joseph, a semi-retired attorney and a Parkinson’s patient, in a collaborative effort to design and develop an assistive device…
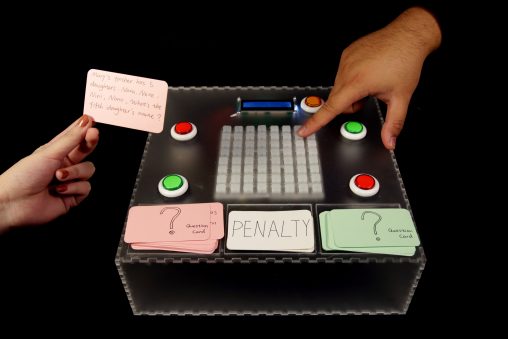
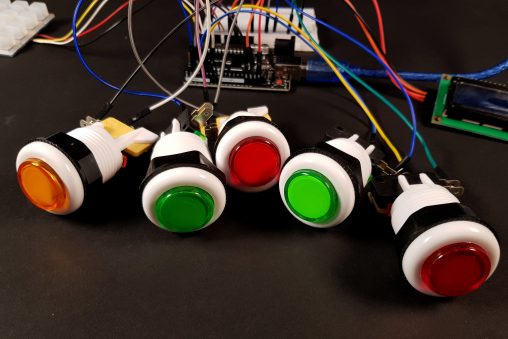
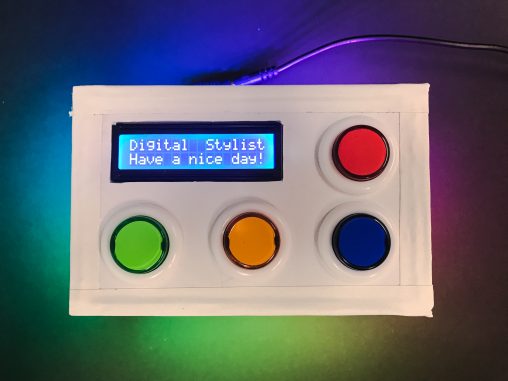
overview This project is a Bingo-style game for Jeffrey to play with his 6-year-old granddaughter, Stella. This game, partially disguised as trivia, would be used as a tool…
Introduction: We are team MARYa (Mohan, Andrea, Roly, and Yingyang), four students at Carnegie Mellon University that are assigned with the task to create a useful implement for…
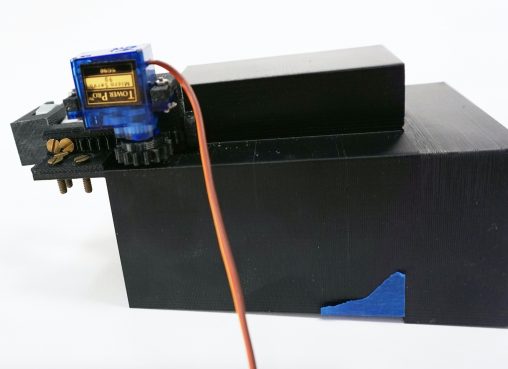
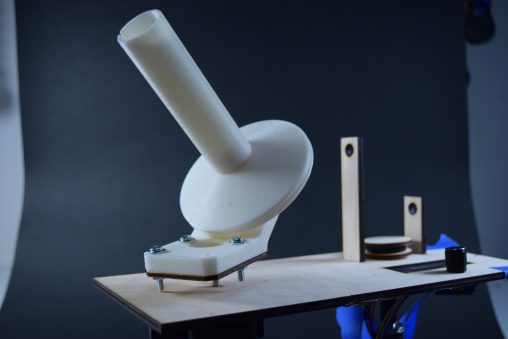
Our device turns “on” and “off” a model of Joanne’s linear toggle switch. The servo turns the gear 160 degrees and the rack meshed with the gear converts…

Background We are team MARY (Mohan, Andrea, Roly, and Yingyang) and we are currently taking an Introduction to Physical Computing course at Carnegie Mellon University. For the final…
INTRODUCTION For the final project of Introduction to Physical Computing, The Weavers, which consists of Jenny, Megan, and Ghalya, was assigned to create an assistive device for Rebecca…
Introduction This post is a detailed explanation of our team’s process towards a functioning behave’s-like prototype. After our first conversation with our older collaborator Jeffrey, we decided…

Introduction After our initial meeting with Joseph, our design client, our team set to work on developing a prototype that focused on alleviating some of Joseph’s freezing symptoms…
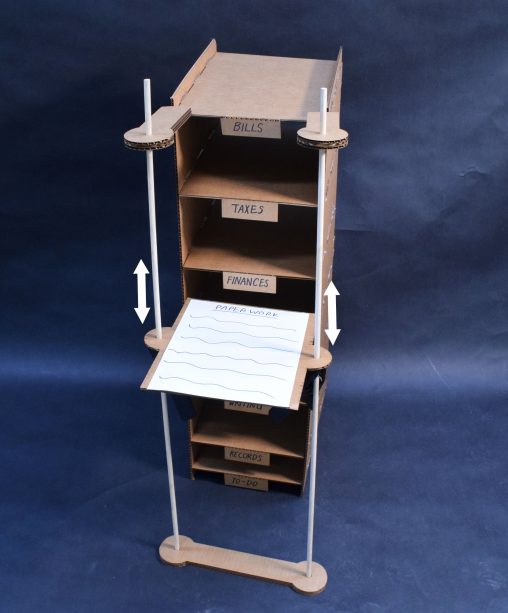
Introduction For the prototype, we started working on the memory aid that Jim identified would be a great asset in his life. Essentially, it would serve as a…

Introduction This post will outline the two meetings that we (Claire and Rory) had with our older teammate, Joanne. These meetings were the first crucial steps for our…

Brief introduction Team: Joey Santillo, Linda Xia, Catherine Yu TEAM JOSEPH We are a group of students at Carnegie Mellon enrolled in Introduction to Physical Computing. For our…

INTRODUCTION For the final project of Introduction to Physical Computing, The Weavers, which consists of Jenny, Megan, and Ghalya, was assigned to create an assistive device for a…
For this project, our assignment was to meet with an older friend, learn about them, and make them some sort of device that they could use daily to…

A brief introduction On November 1st, our group (David, Caroline and Chloé) met up with Jeffrey, an older man participating in the Osher program next to our physical…
Overview It’s not a special day, facing the closet, you hesitate about what to wear to go to class today. Don’t want to waste time choosing clothes every…

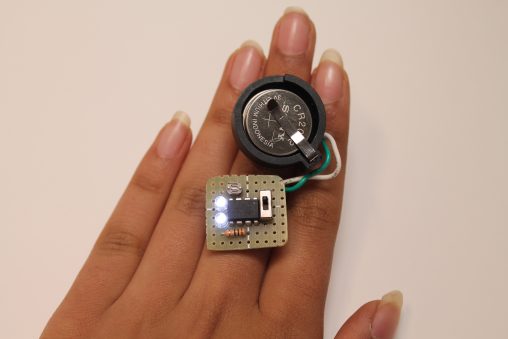
Don’t Chew Your Nail The glasses helps people stop chewing their nails by warning them with a vibrator when their hands come to close to their faces. Detailed…
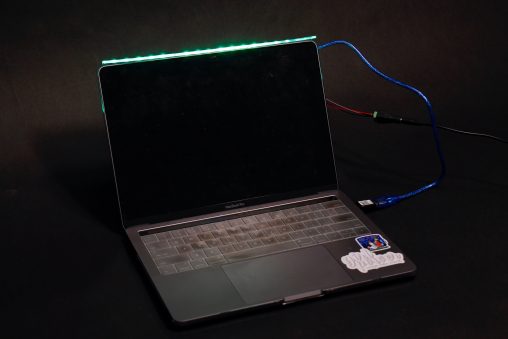
This device changes color after set periods of time to encourage laptop users to look away from their screens. Images of Project Process images and review One of…
This is a project to promote productivity by creating a “punishment” if I look at my phone, and a “reward” if I go long enough without looking at…
This backpack lets me know if I have the chargers I need in my backpack by lighting up the LEDs on the top and forces me to organize…

Description This device wakes me up when it detects that I am falling asleep while doing my work. Final Product The Process Discussion For me, this project was…
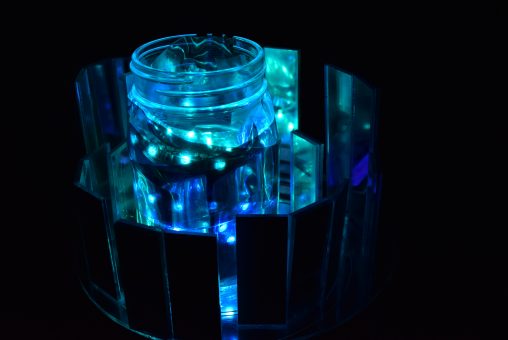
Instead of getting stuck in the same cycle every day, Jar of Change is here motivate you into taking the first step out of your comfort zone! Photos…
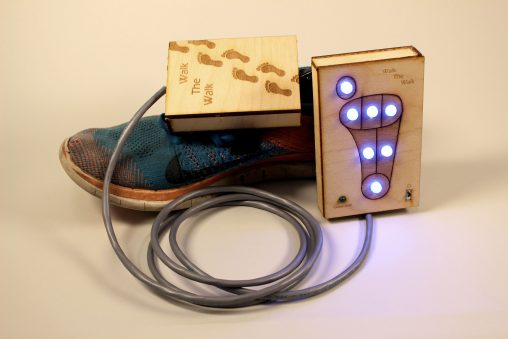
Narrative This project uses 7 pressure sensors in strategic locations in a shoe to visually display the pressure distribution someone puts on their feet. The pressure is displayed using…

Interactive Memory Box is a tool relying on neuroscientific findings used to strengthen the engraving of long term memories right before sleep. This project is a…

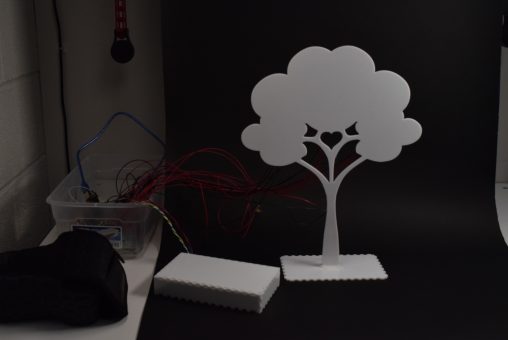
Overall: There is a saying by Virginia Satir, a respected family therapist, “We need four hugs a day for survival. We need eight hugs a day for maintenance….
-Overview This is a device that helps me taking care of my plant especially when I’m not at home. -Process Earlier in the process I had several…
Description: A fidget device to help me focus by giving my hands a mindless task to do. Process: Designing this project was mostly a pain because of how…

The Night Night Light is a responsive nightlight that radiates when tilted off of its typical axis. Process The first major step I took in my process was…

A warning device to measure when jaw tension enters the stress headache territory. Decision Point 1: The power source: I knew I needed an external…

It’s happened to everyone: we misplaced our keys again, left our water bottle behind, forgot our student ID in our dorm. The Forget-Me-Not tray is the one-stop storage…
As a retinal degeneration patient, room lighting and eye strain have been two things that I have always had to pay attention to from a young age. Without…

An alarm clock that make noises and lights up when it is the time to wake up and can be only turned off my jumping on a pressure…
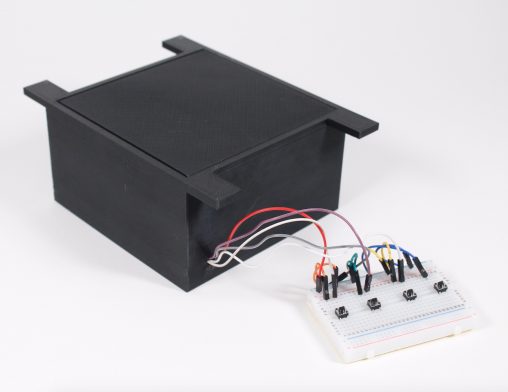
This black box lowers a key when the correct passcode is entered and reels the key back up at the press of a button. Final Product Images Process…
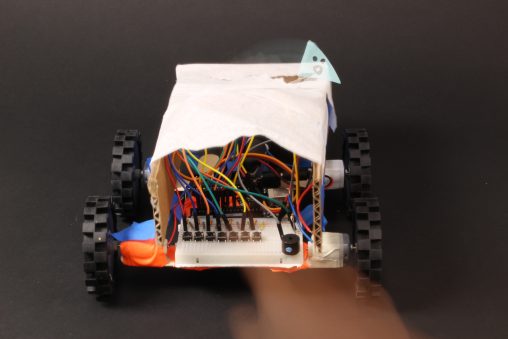
THE MUSICAL BUG Narrative This robot looks like a car with piano keys, making the user think that the songs and wheels might work together somehow. However, if…

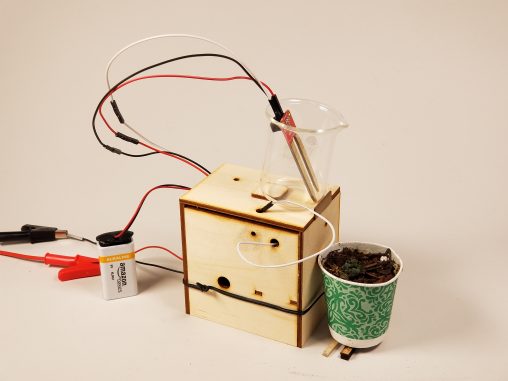
This is a box. Not just an ordinary box, but a tiny wooden box with a glass beaker on top, a potted plant to its side, and electronics…

Megan Roche & Joey Santillo The Startle Box is a wooden box with a button on the top face of the box. The box features a button on…
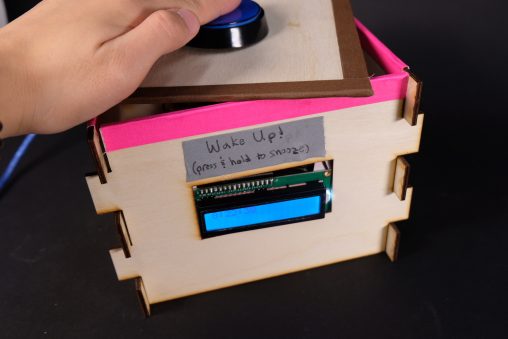
Project Description: The screen on the front displays the time. The box will make a buzzer sound when the display reaches “8:30:0” and there is a button on…

Narrative A wooden cube with a cardboard hand sticking out of one side. When the user tries the “high-five” the hand, the hand swivels back into the cube…

Our birdhouse has two doors, and the project has a series of surprises. When a user comes close enough to the birdhouse, the “bird” in the birdhouse starts…
Needy Wearable is a shirt that reacts heavily when no one is close/when someone is far away, and only calms down the closer one gets. The shirt moves with…
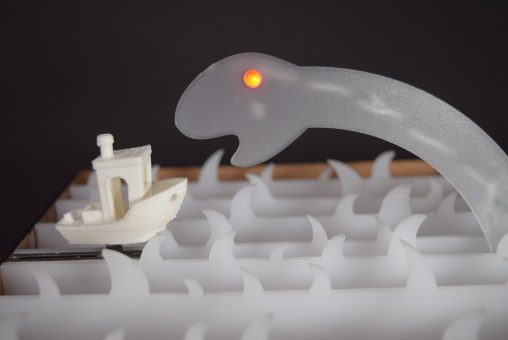
Project Description The white box has white waves inside and a boat, looking like the boat is in a lake or ocean. When the boat moves forward. When…

Narrative Description The project was inspired by an Arduino project found online where a prank was done to people who were trying to get tissue from a tissue…
This is an automated plant watering system. The system detects when a plant is low on water and automatically waters it if it is. This a very useful…
By gabbapeople (on instructables) Short description: This person created a split-flap display that shows the weather including the temperature and conditions using abbreviations on the display based on…
Project title: E-Textile Fabric Origami Project creator: SparkFun Short description: The Creative Engineer Sarah was using the fabric technique – smocking to create three unique fabric origami E-Textiles…
Title: Alzheimer’s Assistant Creator: Abdullah Sadiq Description: The Alzheimer’s Assistant is a system designed to help both patients and their caretakers. The creator set out a list of minimum…
The TV B Gone by Mitch Altman was created with Arduino and has the sole purpose of turning off TVs in public spaces without having access to a remote…
https://create.arduino.cc/projecthub/relativty/relativ-build-your-own-vr-headset-for-100-57adba?ref=platform&ref_id=424_trending__intermediate_&offset=4 Created by Maxime Coutté , Jonas Ceccon, Gabriel Combe and their math teacher and my math teacher Jerome Dieudonne Description: “We couldn’t afford an Oculus so we…
Project Title: Dance Pad with Arduino and Smartphone Project Creator: raef_madin Short Description: The Dance Pad was created to resemble a dance game such as DDR, when you…
Project: Punch Activated Arm Flamethrowers Creator: Allen Pan Description: Through combining a butane fuel chamber, solenoid valve, modified arc lighter, Arduino Pro Mini, and an accelerometer, you can…
Title: Trampolino: Arduino Powered Liquid Pouring System Creator: Savio Dimatteo Short Description: This system automatically pours out distinct volumes of water. It can be used to water plants…
Project Title: Training Heart Rate Zone Monitor Watch Project Creator: Ashley Hah and Marissa Kuhns Short Description: A useful heart rate detection watch that can be worn doing…
Creator: MakeUseOf A simple RFID triggered locking mechanism. I really like the potential of RFID in body implants, clothing tracking and simple automation of mundane daily activities. This…
Project title: Click Canvas, an Interactive Wall Project creator: Natthakit Kim Kang Short description: Click Canvas is an interactive wall for anyone to show their creativity. It’s an interactive…
Project title: Arduino Bike Turn Signal Project creator: Omar Gonzalez, Elvin Chu Short description: This project is a bike turn signal based on Arduino. As cyclist riding at night, there…
Project Title: Intelligent Biomedical Monitor Project Creator: Gabriel Santiago Description: This project uses an Arduino to detect and record vital signs on a patient, which are then sent…
Project Title: Conductive Interactive artWork Project Creator: Not credited on YouTube Short Description: The artist takes a drawing of a face, which seems ordinary, but when touched…
By B. Aswinth Raj This piano is pretty much plain with just 8 push buttons and buzzer. It uses the tone() function of Arduino to create various types of…
Project Title: Secret Knock Detecting Door Lock Project creator: Steve Hoefer Short description: If the user does the correct knock, the door unlocks. You can reset the knock…
Project: Twitter Mood Light: The World’s Mood in a Box Creator: RandomMatrix on Instructables (Source: https://www.instructables.com/id/Twitter-Mood-Light-The-Worlds-Mood-in-a-Box/) The Twitter Mood Box is a color-changing box that tells you how the…
Project Title: Polar Drawing Machine Project Creator: David (https://create.arduino.cc/projecthub/ArduinoFT ) Short description: Most plotters use x and y coordinates, but this one uses polar coordinates. The drawing surface…
Project Title: 3D-Printed Model of “Invertigo” from King’s Island Park Creator: Matt Schmotzer, Purdue University This is a roller coaster almost entirely 3D-printed by Matt Schmotzer of Perdue…
Project title: Tide Tank Project creator: Robert Zacharias Short description: A creative technologist in the South Bronx worked with high school students at a boat-building education nonprofit. The…