Problem:
As we transition into a working from home setup during covid, we lose alot of the immediate feedback through body language and facial cues from people we are communicating with. In particular, this is pronounced in a presenting information to a large group of people, where a successful presentation relies on tailoring the speed, complexity and cadence to engage the audience sufficiently to keep them interested, but not go too fast that you leave them behind.
When presenting a deck through online meeting platforms, presenters are often unable to monitor the real-time vibe of the audience since participants are not always visible due to screen real-estate (assuming that they have their cameras on). Even with the hand-raise feature, it’s hard for presenters to respond to questions in a timely manner.
Solution:
I identified two main modes of feedback that are most important to a presenter:
-
- Are there any questions?
- Are people paying attention?
Raising your hand
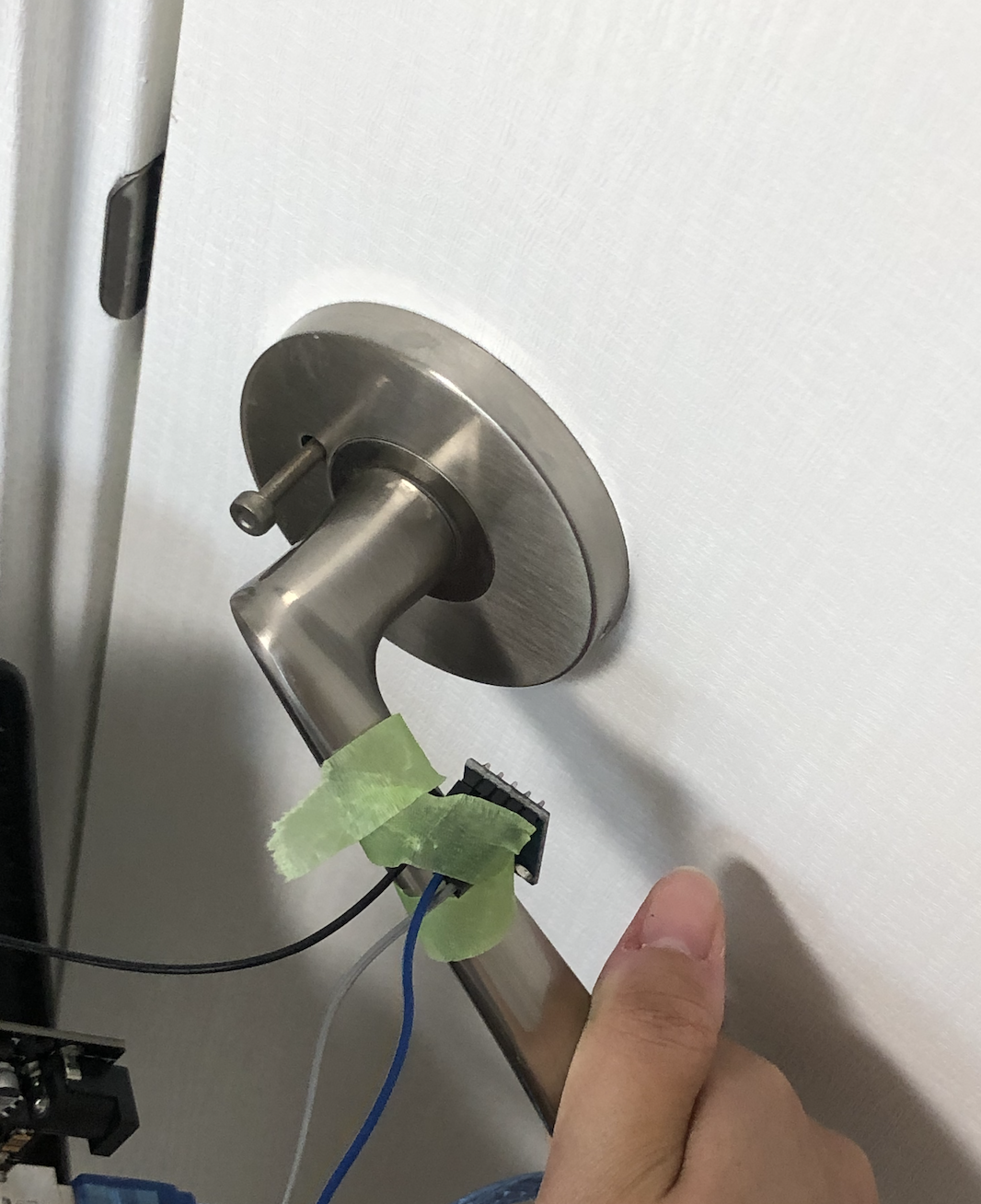
To indicate if the audience has any questions, I used a servo as a physical indicator of the presence of questions. Typically, when participants raise their hands during a meeting virtually, this is missed. By mapping this state to the servo, presenters now have a better understanding of when exactly questions are being raised.
Paying attention
One of the indicators of restlessness in your audience is fidgeting. If people are bored and unable to pay attention, they are likely to be crossing their arms, rearranging their seating posture, etc. We can monitor this by observing the rate of change in their posture. Using the poseNet in p5.js, we can abstract this information by drawing keypoints of your posture in the webcam and do a comparison.
I wasn’t quite able to get the serial output from p5.js to work, so I replaced it with a potentiometer as an abstraction for the demo 🙁
Kinetic feedback
By translating this to a tapping pattern if the changes exceed a particular threshold, presenters are able to understand when their audience get restless.
It is hard to discern the nuances if the tapping pattern were to change incrementally, so I set up 3 states with a threshold rate of change that matches 3 different tapping states.
1 No need to worry
Some movement is to be expected in the audience, so presenters don’t need to be concerned about a non-zero level of movement.
2 Antsy
When the audience starts getting restless, the tapping starts with a lower frequency. The presenter can quickly re-engage the audience by speeding up and moving on. As the audience returns back to normal and pays attention, the tapping should cease.
3 I can’t stand this anymore
If the audience crosses the second threshold indicating restlessness, the frequency of taps doubles and conveys to the presenter that they should try to wrap up the presentation ASAP since they’ve likely already lost their audience.
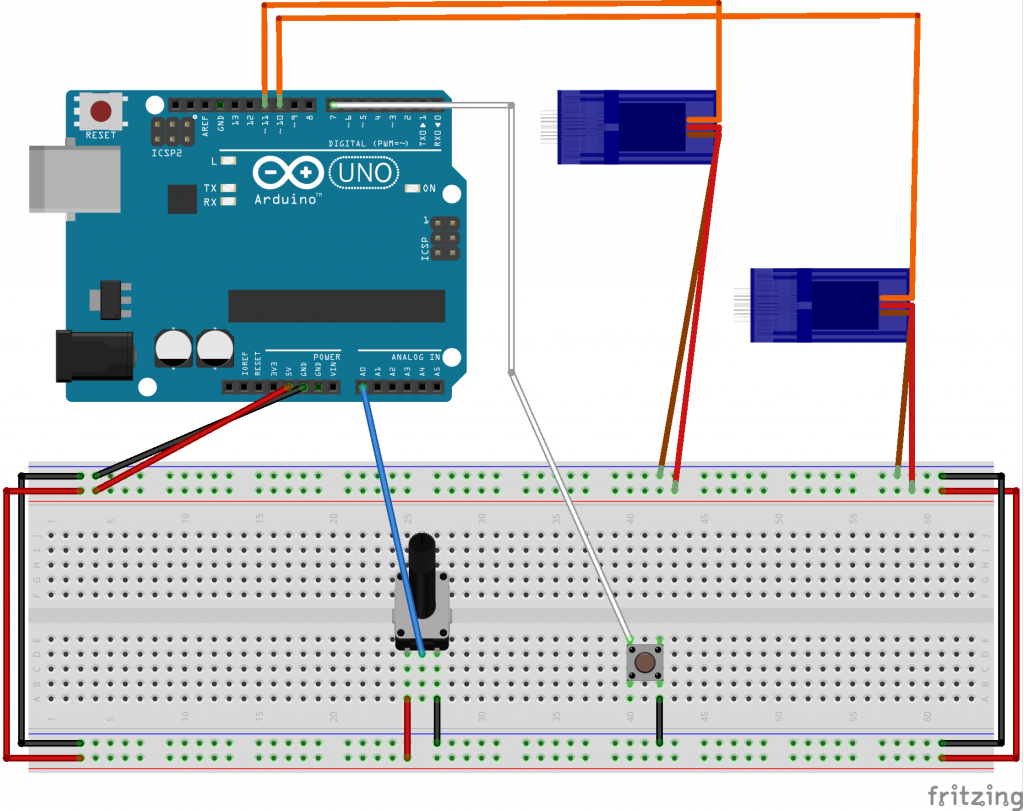
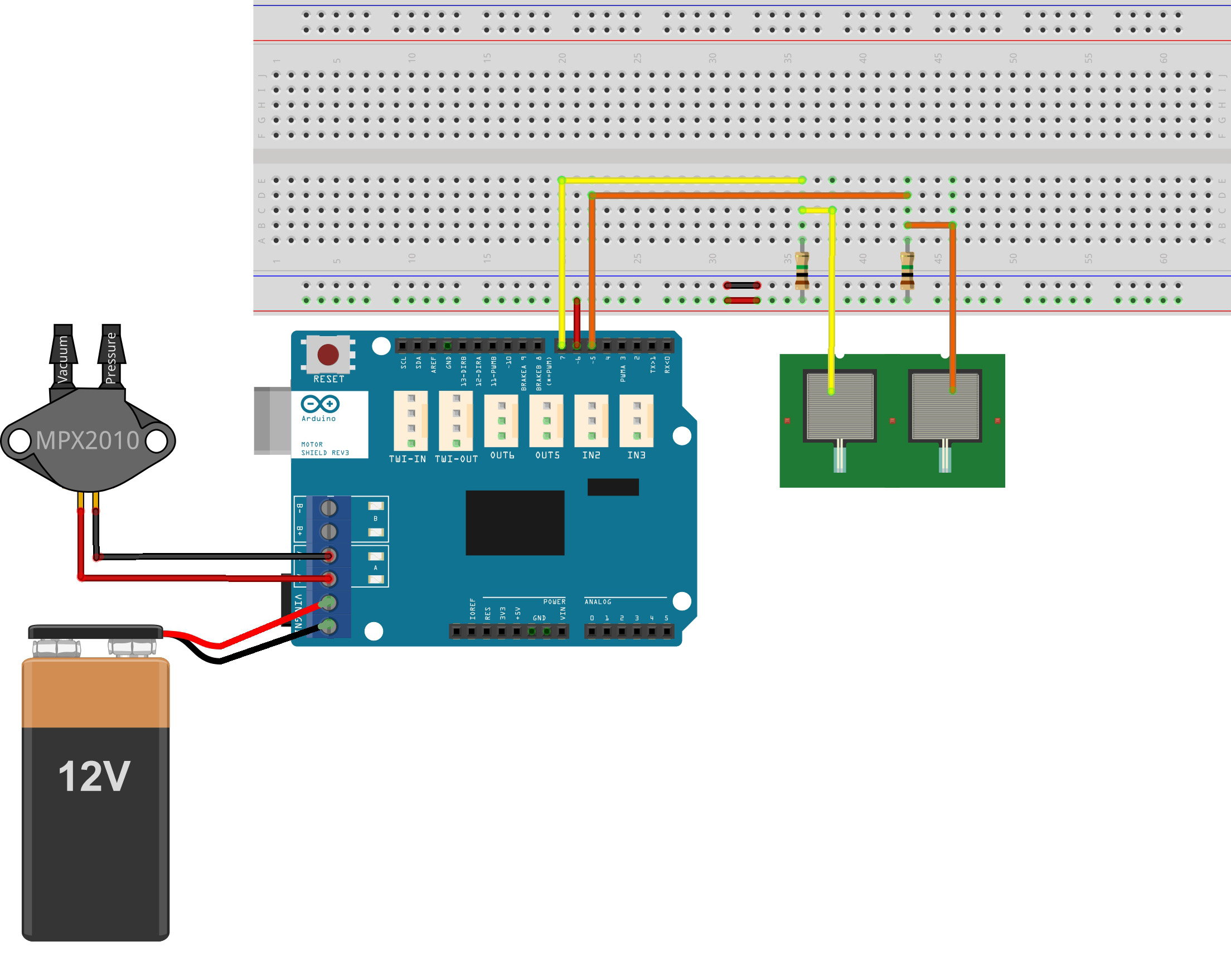
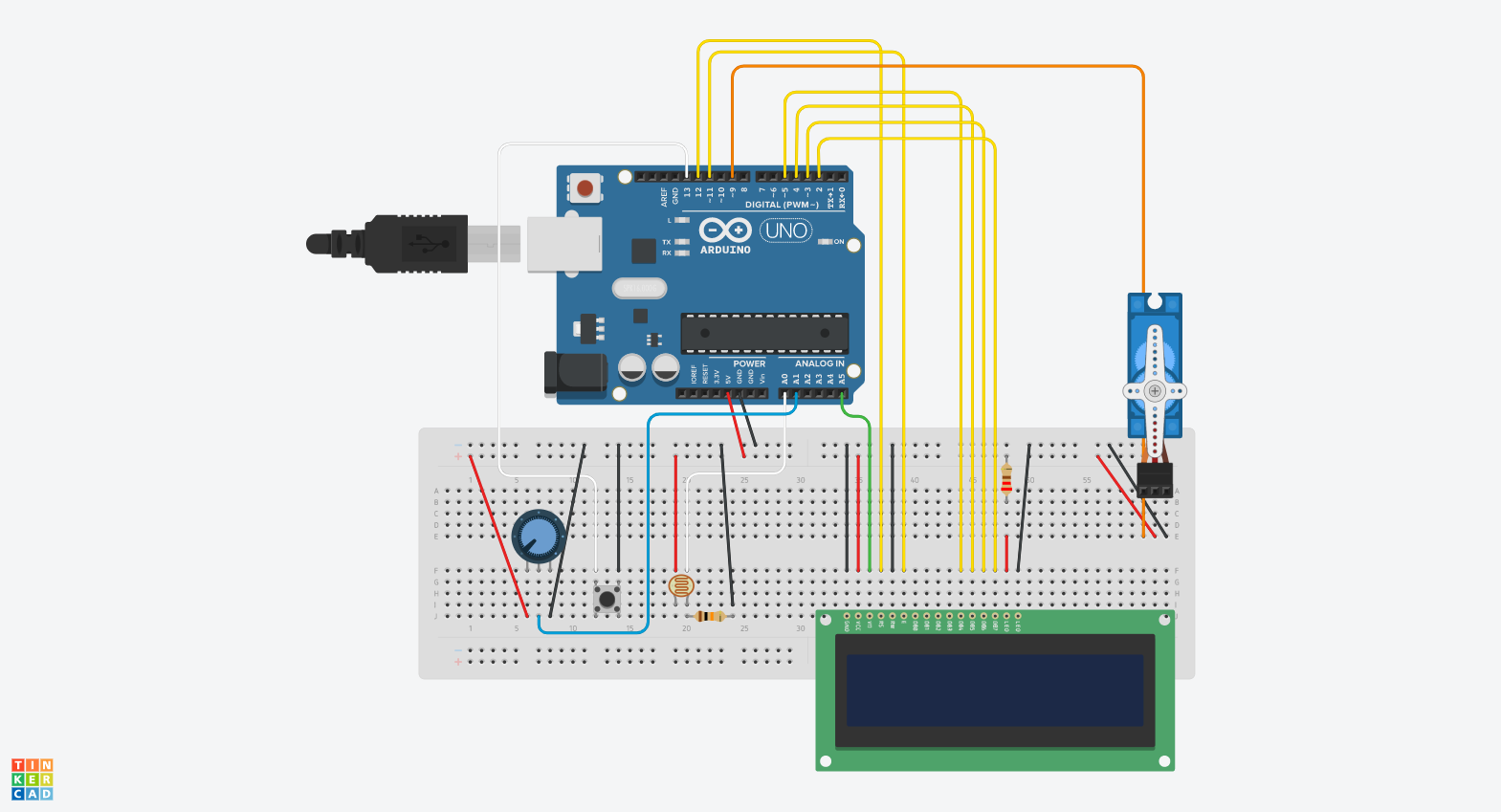
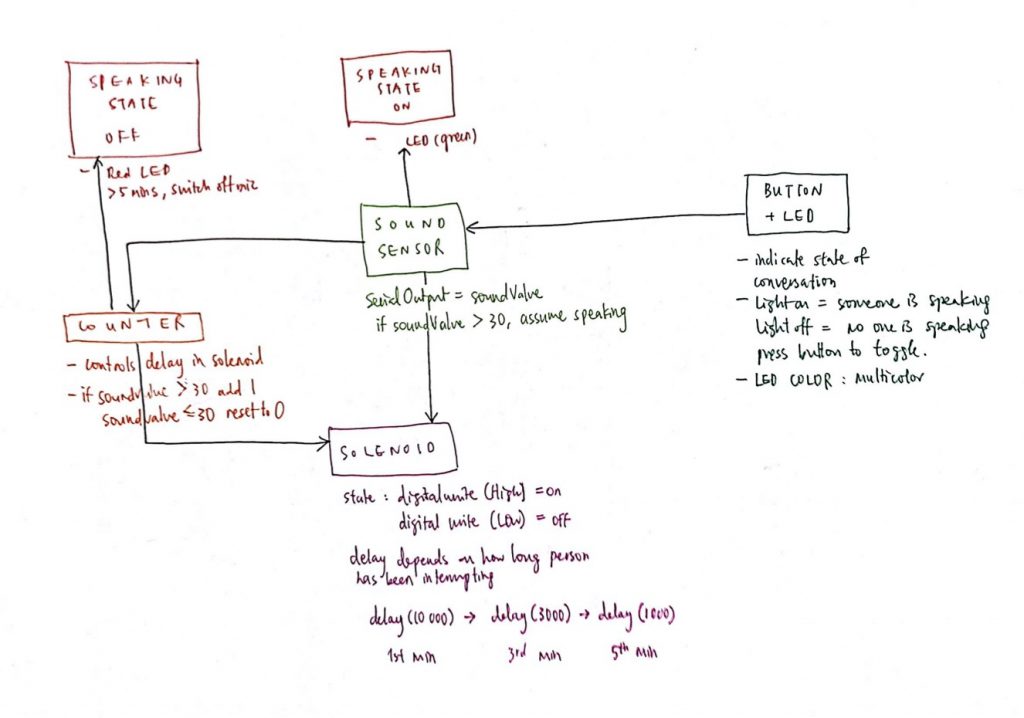
Schematic