Project Statement
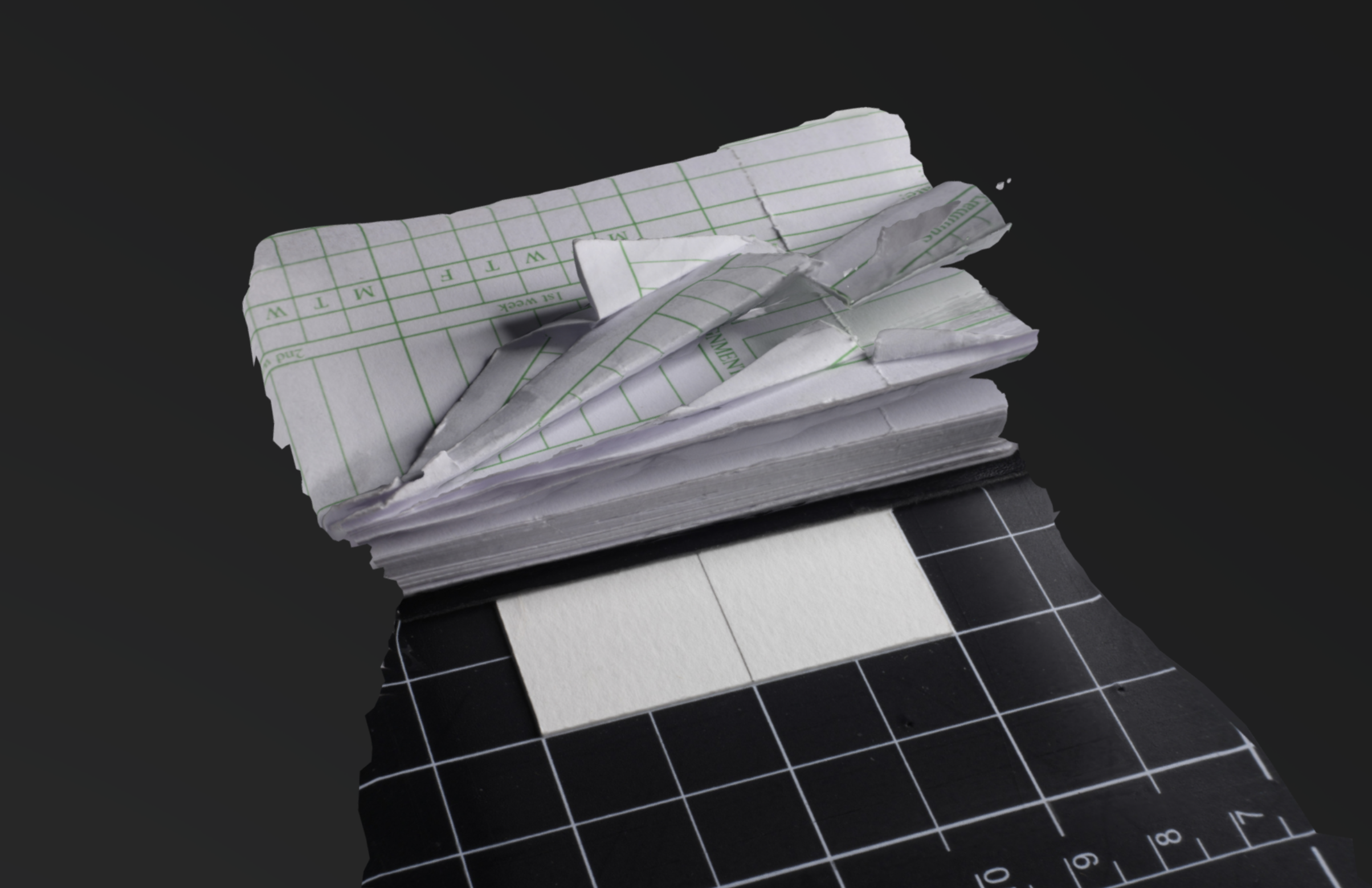
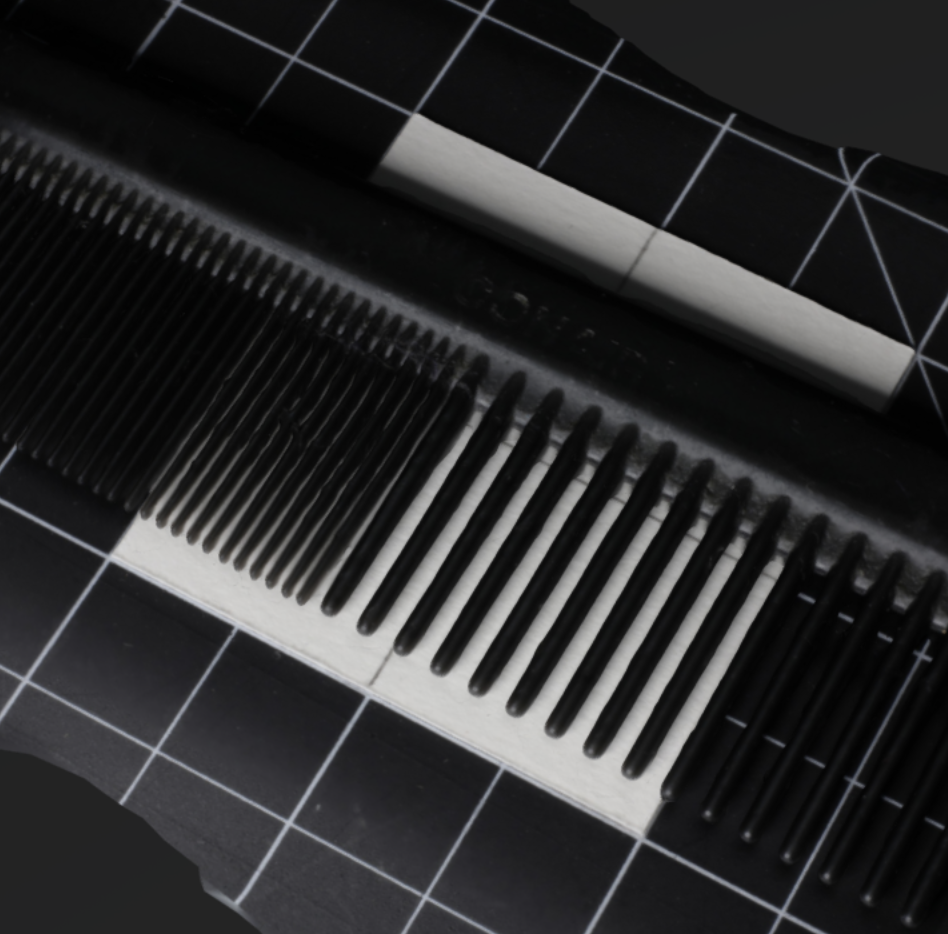
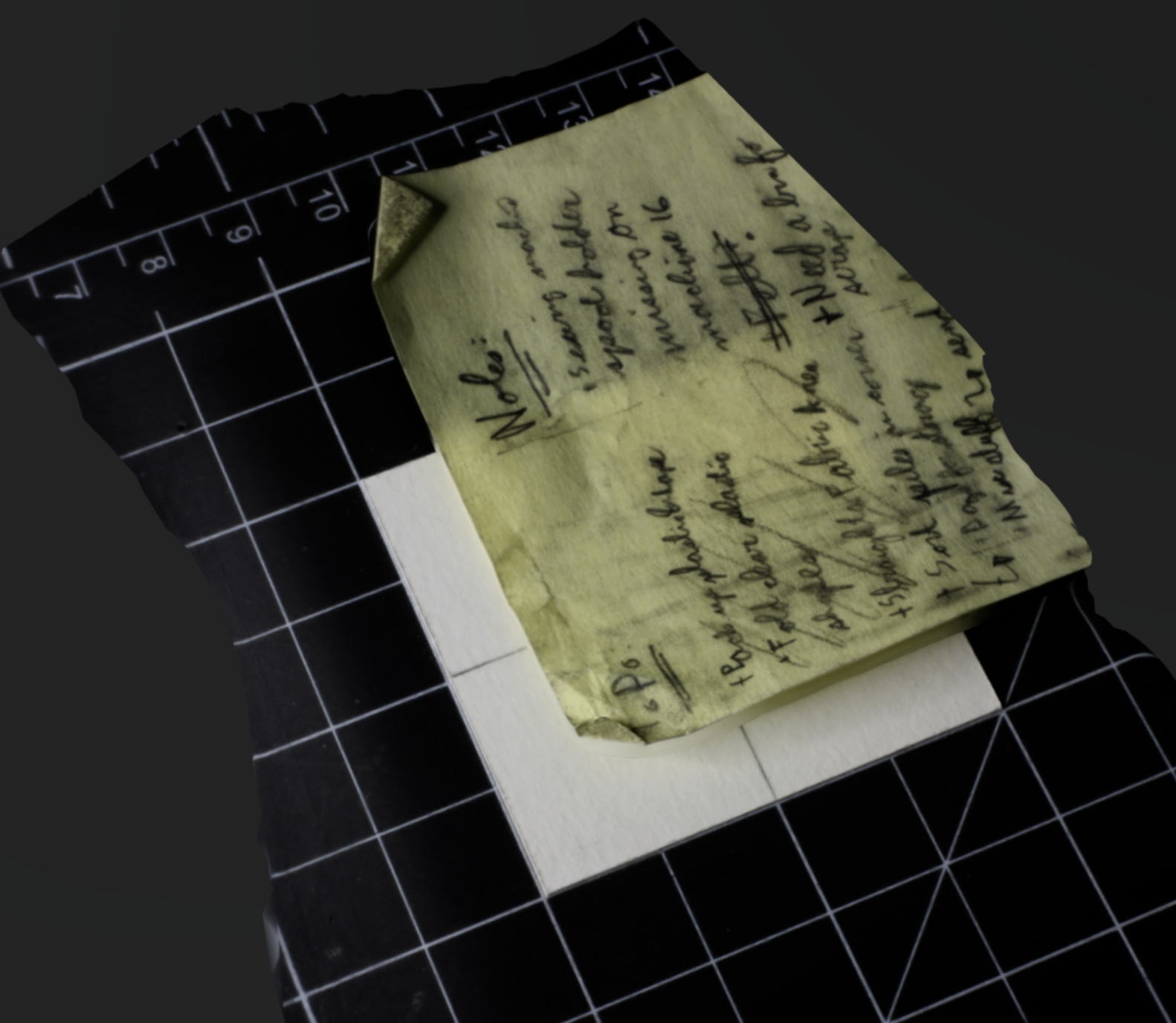
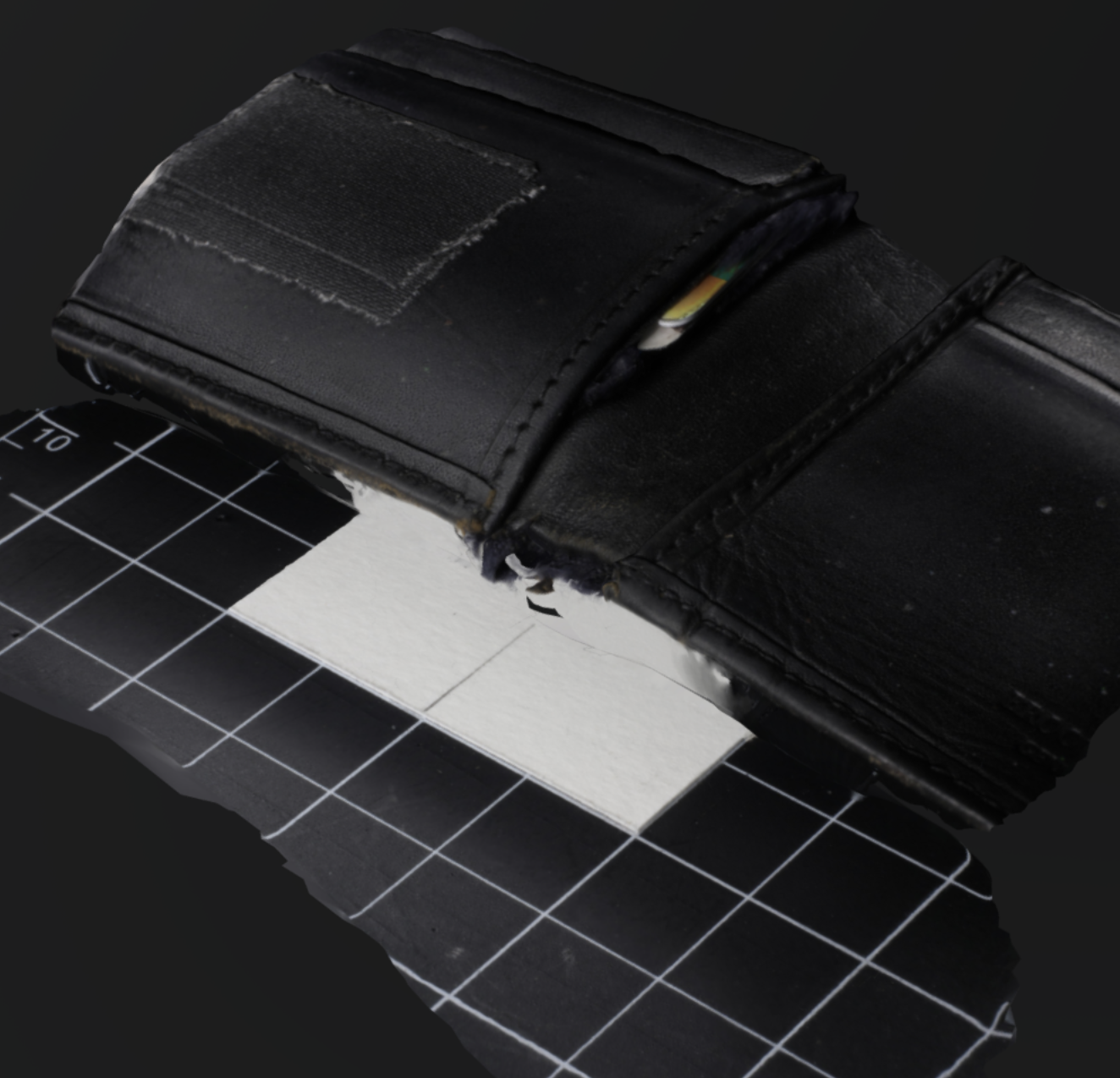
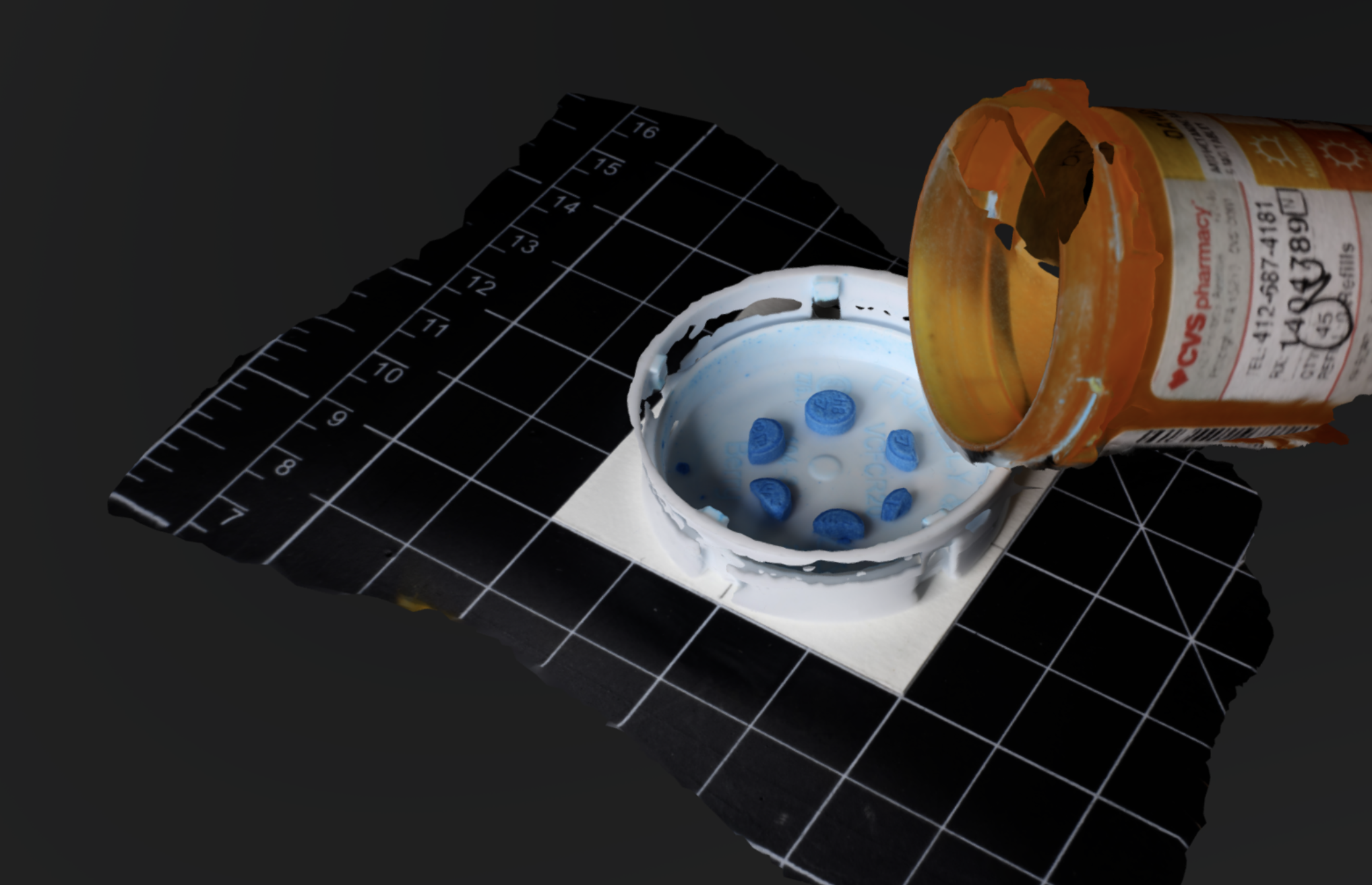
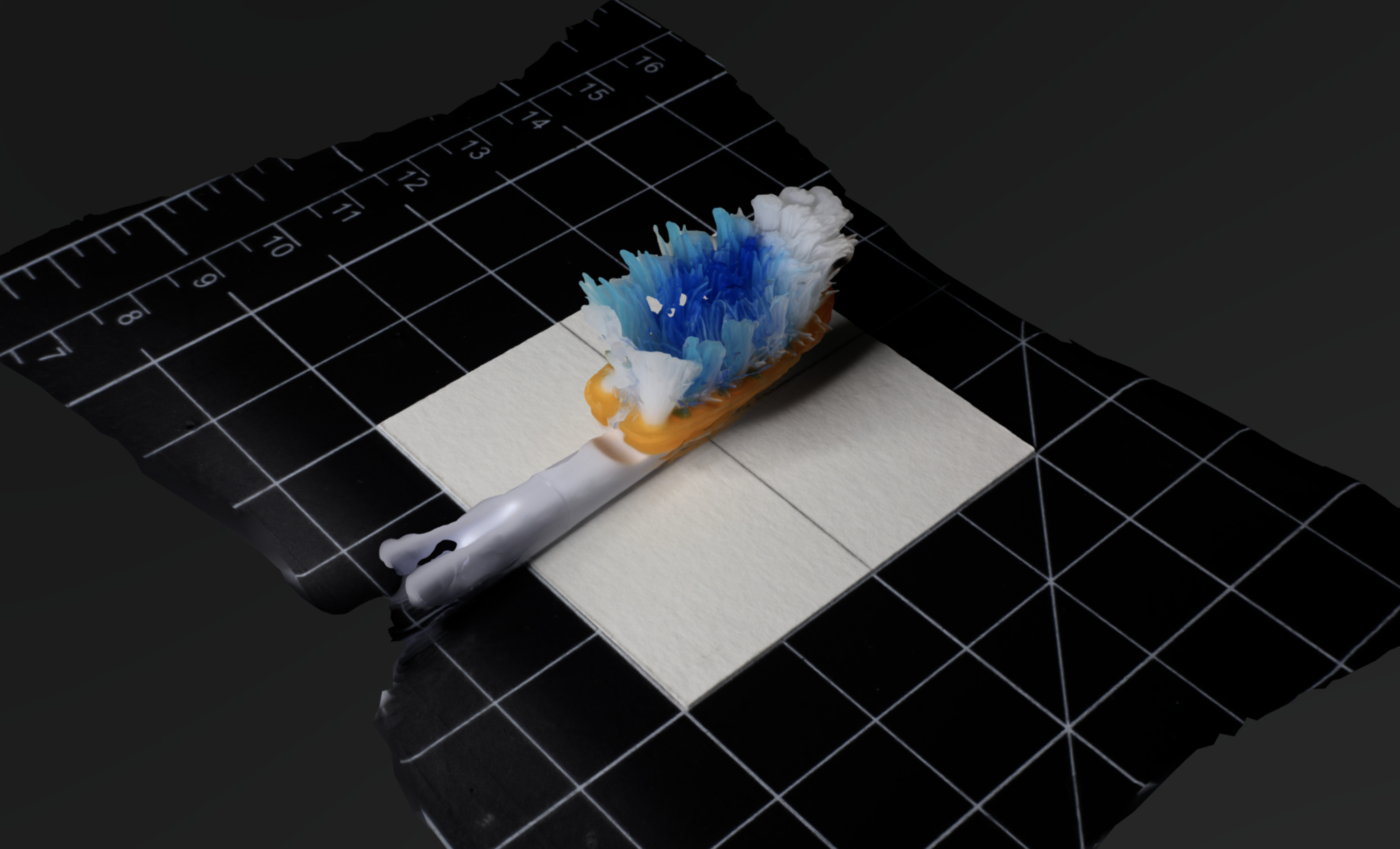
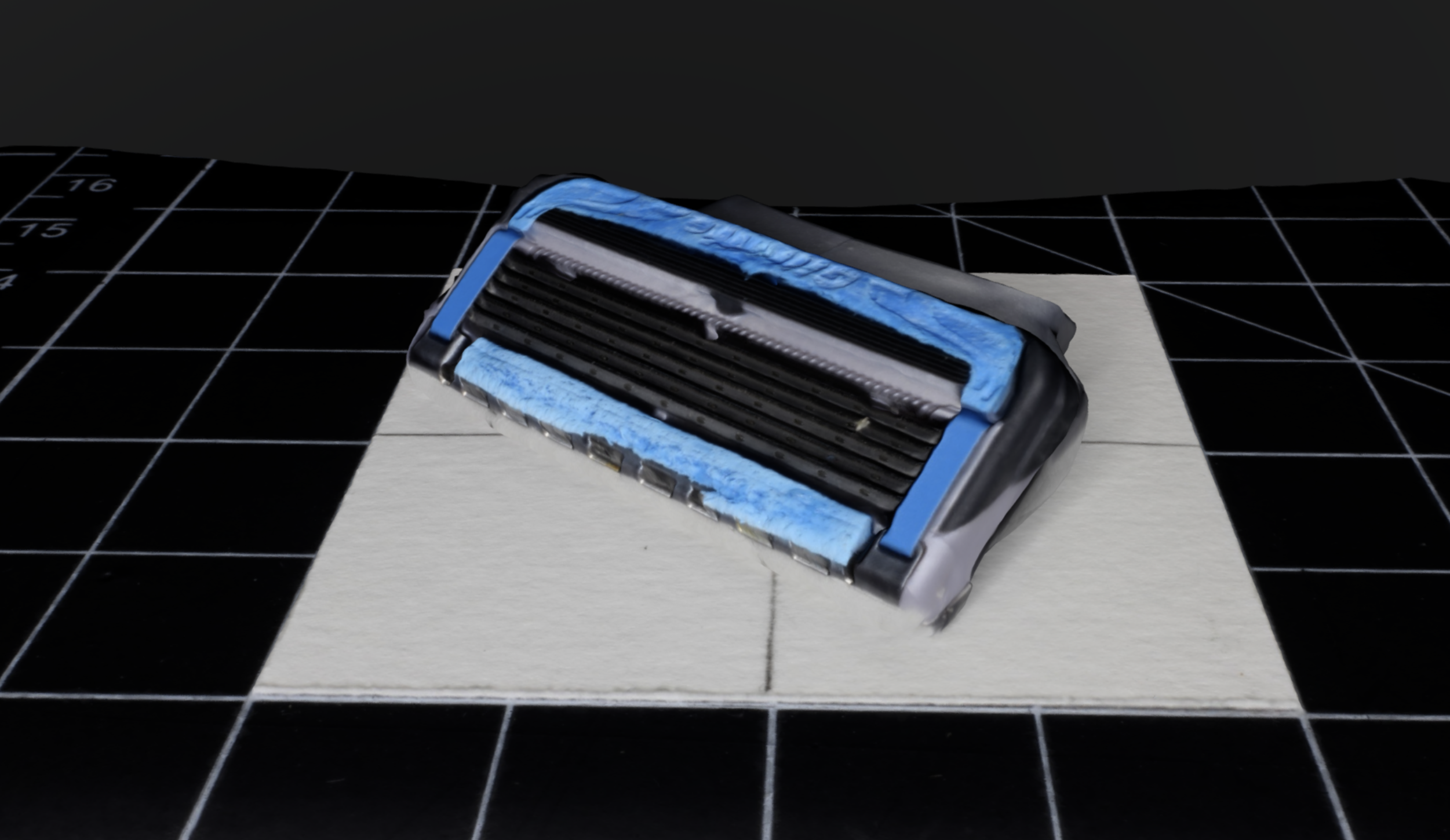
In this project I explored the emergent textures of my worn out stuff – an over used tooth brush, a pill bottle that’s been in my bag for way too long, a charging cord that’s slowly busting out of it’s casing. I explored the textures of these things through robot controlled photogrammetric system (robo – grammetry).
Project Motivations
I began this project with the following project statement:
“I interact with a myriad of objects in a single day, often times these are things I carry with me at all time – such as my pencil, sketchbook, or a bone folder – what patterns might emerge if I sample each of these objects and put them on display?”
As I worked on this project my goals for and understanding of it developed. This project has become an exploration of the unique signature of wear and degradation I leave on some of my things.
Building a Robo-grammetric System:
This project emerged from my learning goal to gain familiarity with the studio for creative inquiry’s universal robot arm. I was able to make the robot step through a spherical path, staying oriented on one point in a working frame, while an Arduino controlled shutter release triggered a camera in sync with the robots motion. The robot script was laid out so I could calibrate the working frame with the plane of my cutting mat. The goal of all this was to create highly standardized photogrammetric composition.
My capture machine was a robotically guided camera that snapped 144 distinct photos of a sampled objet while stepping through a spherical path.
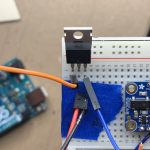

An Arduino was used to open the shutter of the camera every 3 seconds, while the robot moved between to a new point every 3 seconds. The processes were synced at the beginning of every capture.
Why Photogrammetry + Robot Arm?
The goal of this project was to capture the texture of my everyday objects and to see what might emerge from that capture. Somewhere along the line my focus moved to the identifiable aspects of wear and degradation of the objects I interact with. Photogrammetry allowed me to capture these textures in a unique and dimensional way and the Robot arm allowed for extreme standardization of capture.
The Models


Full library of models can be accessed here.
Project Evaluation
With respect to my technical and learning goals this project was a success.
In terms of content and articulation this project feels unfinished – I spent much of this project focusing on the system of capture, and only in the last week have I been able to see the output of this machine. This system has the potential to capture the distinct degradation of people’s things – I believe a larger set of models would highlight greater implications about how one considers and interacts with their stuff. This typology might be more meaningful if I had captured more objects.
This project was difficult because, at moments, it felt like a self portrait of my neurotic tendencies, in my typology machine, and my neglected and worn down objects, the captured objects.
Project Inspirations
As stated in the project proposal: this project was inspired by a sequence of photos seen in the film 20th century women. The photos are a typology of one character’s things: lipstick, a bra, her camera, etc. Through the composition and curation of objects a unique portrait emerges. My goal in this project was to use my objects to create a self portrait.
In addition, this project’s commitment to standardization is connected to the use of camera’s and capture in the scientific process.