Project Description:
Inspired by the movie Mission Impossible, I decided to use a DC Motor and a H-bridge to show a wire action of a miniature character (designed and sculpted by Tatyana Mustakos).
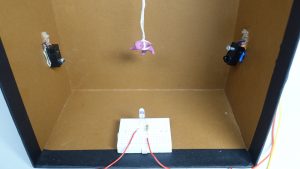
 The situation I planned to portray was: The character approaches to a target treasure (white LED), going down from the ceiling. However, the character touches the security laser beam (expressed through an IR break beam) of the room, then triggers the wire to wind the character back, up to the ceiling. Then, once the IR beams stabilize, the wire will reverse its winding direction, letting the character go down towards the target treasure again. This motion will happen in a loop.
The situation I planned to portray was: The character approaches to a target treasure (white LED), going down from the ceiling. However, the character touches the security laser beam (expressed through an IR break beam) of the room, then triggers the wire to wind the character back, up to the ceiling. Then, once the IR beams stabilize, the wire will reverse its winding direction, letting the character go down towards the target treasure again. This motion will happen in a loop.

One biggest trouble I had was maintaining the stability of the circuitry for this. While I had to mount all hardware parts to the set box, I had to make sure each wire wasn’t falling off of each other due to gravity.
Due to these mechanical stability issues, I ended up burning my arduino up while documenting for this project. The wire motion has been moving okay, however, the motion does not perfectly sync with the ir break beam all the time, so the wires end up winding/unwinding more than they need to.
What I’ve learned:
MOTORS and H-BRIDGES ARE QUITE TRICKY (to me, at least). I’ve burnt up so many parts (wires, fans, h-bridges, AND my arduino) and I even shocked my own laptop. I had some mad fun with these happenings.
Google Drive (code/fritz diagram/ Video): https://drive.google.com/drive/folders/0B70fyRiHk85qWEZWOEF6RzZyTFk
*VIDEO*: I will re-upload the video once I get a new arduino (I burnt my arduino while documenting, and I didn’t get to capture any motor movements while the circuitry was perfectly fine)