Category: Assignment 6: Final Project Proposal
Project Proposal
Subject to significant change based on the wishes of the head of the school of architecture. Will meet with him early next week.
Final Project Proposal: Bolaji Bankole
Concept:
The idea that I want to portray with my project is general apathy/undirectedness being a detriment. The way I want to show this is by creating a robot that has clear goals to move to, but without outside intervention it move very lethargically, making random detours or stopping and is generally not very motivated.
However, motivation is not impossible to find, so if a viewer was to wave near the robot/nudge it in the right direction, it gets to where it needs to be faster.
Hardware:
- A frame of some sort, probably laser cut in the end
- Motors, probably continuous rotation servos
- Various proximity sensors, PIR is right out.
- At least one raspi, with servo hat
- raspi camera
- A couple of arduinos, lots of LEDs
- Batteries
Obviously as I prototype, this is very subject to change
Software:
- OpenCV on the raspi
- Will need to be able to identify its targets, and then not only go to them, but not go to them.
- Also needs to react to stimulus in a convincing and understandable way.
Process:
The first thing I’ll need to get working will be tracking the targets, because that is the most complex part and if it doesn’t work well, I’ll need time to come up with some other strategy. Then making the robot, and making it move to the targets, integrating the stimulus, and then allowing for multiple targets and signifying which one is active.
Final Project Proposal – Akshat Prakash – Braille Tutor
Below is a pdf of my final project proposal.
Project Proposal: Hourglass
Abstract / concept statement
Concept 01
My concept is to create a timepiece that reveals the qualitative fluidity of time passing. The form and interaction will be inspired by an hourglass. I want the series of pieces to be able to respond to each other and spark a chain reaction of movement. This will be done using a changing balance in weight.
Concept 02
Create an hourglass that can change the timer amount. When a certain amount of time is chosen, the hourglass can accurately adjust the amount of sand that is needed. The intention is for the interaction to be very physical.
Hardware
- Servos
- Solenoids
- Motor
- Transistors
- Force sensor
Software
- Weight analysis that connects weight to specific actions
- Servo control and positioning
Order of construction and testing
- Develop sketches to figure out logistics of overall hourglass
- Plan ways that glass can interact with the hardware, and be hidden so the form does not reveal the technology
- Figure out how to use hardware to change the amount of sand (aperture form?)
- ^^create multiple prototypes with this interaction, it will be the most crucial development
- design the enclosure that will hold the glass form
- Have people test out form and see if it is understandable / has the right affordances
- Fix all the things that didn’t work
- repeat 7 and 8 with a few other people
- make an information poster for the final show
- write up my artist’s statement for the final show
Potential Issues
- Will the sand affect the hardware?
- Will the glass be able to integrate well with the wood and hardware?
- How will the piece be maintained / opened to be fixed if necessary
- How to mask mechanical servo movement and integrate fluidity into form
- Does the hourglass even need to use an Arduino? Is it about accuracy?
- Once the timer is started, is there a reset response?
Assignment 6: Final Project Proposal – “Draw Your Music”
SooJin Sohn – DRAW YOUR MUSIC (Proposal – Draft 1)
- Abstract/Concept:
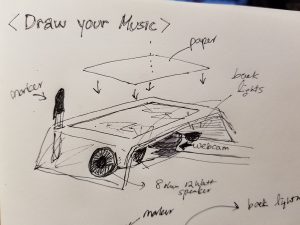
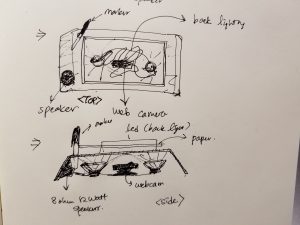
The core objective of this project is to explore the possibilities in conversion of media through user interaction. This project is designed to capture and scan a hand-drawing on a piece of paper, translate the coordinates of the drawing into musical notes.
- Material:
- Arduino UNO – 1
- Clear acrylic boards (paper scanning area)
- White paper
- Black marker (the ink needs to be strong and heavy enough to bleed through the other side of the paper)
- A web camera
- some back lighting material for eliminating shadows
- A push button – that triggers the camera to initiate scanning/translating of drawing into music
- Some heavy Processing/MAX and Arduino coding
- Plans for Production:
- Make sure to build the code in the following steps:
- Control the webcam to capture a fixed frame size of a paper.
- Manipulate the captured image into grayscale, and define an array that saves all RGB values of each pixel.
- Map the captured image pixels into 0 to 1, and 50Hz to 1500Hz (serial communication between Arduino and Processing)
- Print the mapped value coordinates
- Serial communicate the coordinate values to Arduino, and print the coordinates into auditory data.
- Build the hardware
- Use the acrylic boards, and glue the webcam along with the back lighting switch.
- Connect a simple push button switch to the Arduino (the push button should work as the trigger for scanning and initiating the translation of the image to music)
- Make sure to build the code in the following steps:
Koi Fish Coffee Table
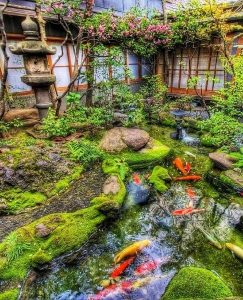
This project is going to be a installation for the size about a side table/coffee table. The top of the installation would be in glass/clear acylic where things can be put on like a real coffee table.
The table installation would be able to interact with different objects been put on the table based on the temperature. The koi fish would swim in a random pattern (similar to a real koi fish). When someone sits at the table and put something on the table top, if the thing is hot like coffee or tea, the koi fish will swim away from the object. If the thing is cold, like soda or snacks, the koi fish will swim towards the project, and swim around for a while.
Personally, I am very fond of the east asian style gardens (Chinese and Japanese). The project is to make the living room more interesting for people that doesn’t have enought space or time to take care of a koi pond garden. Kind of like the idea of karesansui,the Japanese Zen Garden, which is very artistic and easier to take care of. In the modern urban settings, it is really hard to have a big enough tank/pond body of water for actual koi fishes. However, a koi pond that does not require water or big space would be ideal.
Hardware:
- 2 or 3 stepper motor (maybe more)
- Some non real koi fish (Wood carved would be awesome, 3D printed is also acceptable I think)
- A couple of timing belts (or one really long one), and pulleys
- tiny camera/IR camera for tempertature detection/ Motion Detector?
- Some white sand (For appearence, not super necessary for mechanical part)
- A couple of strong magnets
- I might need more things but I can’t think of it right now….
- (basically it is the x and y axis for a 3d printer/laser cutter)
Software:
- I need software to work with the camera to read temperature
- I need some library to work with the stepper motor
Order of Construction and Testing:
- Make the stepper motor work
- Figure out how to detect temperature
- Construct the table with 8020
- Install the stepper motor and timing belt to test
- Make the servo work and behaves like a koi fish
- Install magnets and stick the koi on the moving part
- Make the table look like an actual aquarium/pond
- Work with a couple of servos to make koi more realistic
Final Project Proposal: One of Two options
I explored a couple other ideas and included them just to show my process.
https://samanthaho.myportfolio.com/final-project
My actual project proposal is to make an interactive lamp that requires a group of people to coordinate with each other. The lamp shade itself will be lasercut be on a vertical track. One person of the team controls the vertical height of the shade and the other, the brightness of the bulb.
The height of the shade will directly correspond with person A and how far away they are from the lamp. Similarly, person B will need to take their phone out and use their phone light to control the brightness of the bulb via photoresistor.
It requires the coordination of both parties to properly project shadows and silhouettes onto the table.
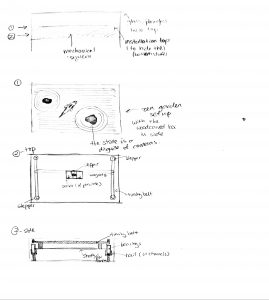
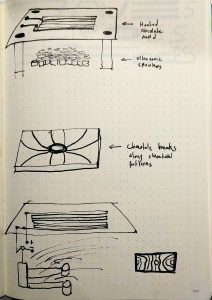
Project proposal: chocolate temperer
I want to create a tool to temper chocolate bars with designed weak points; this will allow chocolate to break into specific shapes. To accomplish this, a heated bar mold to control the rate of temper of chocolate will be made. Ultrasonic speakers will be paced below the chocolate bar mold. As the material cools, standing interference waves will vibrate the chocolate to create low pressure areas. The chocolate’s crystal structure / density will be different along specific lines.
Steps:
- Design 3D model for chocolate bar
- 3D print
- Screen print resistive, conductive ink on thermoform, food-safe plastic to create heating element
- Thermoform printed plastic over 3D print
- Test heating element by running current through print
- Mount 2-4 ultrasonic speakers under the bar mold
- Program arduino to run through a sound (sine wave) sweep, user can press button when the desired interference pattern is shown.
- test!
Tools:
- Arduino
- ultrasonic speakers
- push button (or capacitive sensor)
- thermoform plastic
- 3D print of chocolate mold
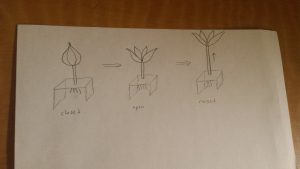
An Interactive Mechanical Flower
Abstract/Concept
For my final project I want to create an interactive mechanical flower. The idea behind the interaction is that the flower thrives off of human touch and connection rather than sunlight and water. I am imagining a structure with a single flower bud and stem mounted on a clear box or frame, and roots suspended underneath (see images below).
Conceptually: I want to accomplish a few things with this. First, I want to explore an organic, fluid, and natural side to mechanical design as opposed to linear and strictly functional. Second, I want to portray the idea that living things need human connection just as much as they need the basics of food, water, shelter, etc.
In terms of what the flower will actually do: I want the flower to close when nobody is around and open when people come closer (the analog to opening/closing in response to sunlight). If possible it would be cool if it could “grow”, maybe get taller or raise and lower, when people touch its roots (the analog to growing in response to water and nutrients).
Hardware
- Flower
- Wood (probably ⅛” basswood, which has worked well for me in the past)
- Distance sensor
- DC motor
- H-bridge
- Stem
- Long threaded rod and thing to screw it into
- DC motor
- H-bridge
- Roots
- Thin wires for the roots
- Capacitive touch sensor
- Base
- Clear acrylic
Software
- Flower
- I need code to read the distance sensor and open/close the flower accordingly
- Stem/roots
- I need code that will read capacitive touch input and raise/lower the stem accordingly
Plan
- Make simple petals that open and close using a motor and H-bridge
- Make the opening/closing respond to distance sensor
- Create a raise/lower mechanism using motor
- Mount flower to this
- Make the raise/lower respond to touch sensors