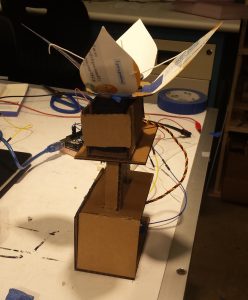
For the rough crit I have a cardboard prototype of my interactive mechanical flower. Currently it has two axes of motion:
- the flower opens and closes based on distance readings from an ultrasound distance sensor (opens when you are close, closes when you are far)
- raises or lowers with a linear actuator (nut and bolt)
Video: https://youtu.be/9XyJqv4cWkE
Fritzing and sketch: final prototype
Overall, I’ve gotten down the basic range of motion I was going for. However, the motor is too slow even with increased voltage so the raise/lower motion is not very noticeable (in the video, it’s very slowly rising) and a faster motor wasn’t strong enough to carry the weight. I also don’t really like the way the motion looks. Because of this I am considering removing the linear actuator part and focusing on interaction with just the flower.
Next steps:
- work on form (make the flower look nicer with wooden petals, covered center, etc., replace cardboard with wood/foamcore)
- add interaction to the petals besides distance (touch)
- if I’m keeping the linear actuator, find a way to make the motion smoother and faster
 BrailleTutor
BrailleTutor