The Project:
For this project, I conducted a study of bathroom deserts around CMU campus.
Process:
The research question: How long does it take to find a gendered vs gender-inclusive bathroom on campus?
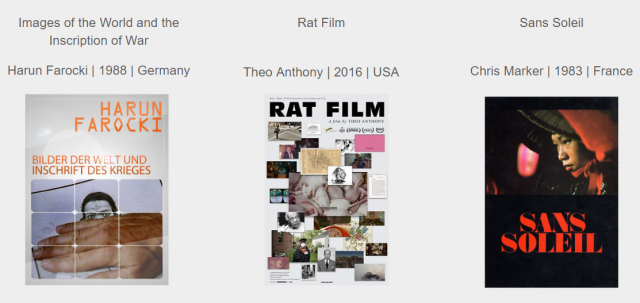
I was particularly inspired by the NYT’s Ten Meter Tower project and Meaghan Kombol’s The Subway Lines, which both explore the experience of performing daily/non-daily tasks, such as diving off of a ten meter diving board or riding the subway. These projects compelled me to think about what tasks I do on a daily basis that I personally don’t pay much attention to. This is how I decided on going to the bathroom.
After talking with Nica about this project, the aim changed from just exploring areas of the campus where I go to the bathroom to figuring out and engaging with areas with severe bathroom deserts. By bathroom deserts, I mean floors or sometimes even whole buildings that do not offer a gender-inclusive facility, which are usually single-stalled rooms with appropriate signage (a toilet, no reference to “men” or “women” at all). This was a more compelling juxtaposition, since I still remember in my freshman year (circa fall 2019), I didn’t see any gender-inclusive bathrooms – they were all gendered.
This inaction extends further than CMU’s slow transition to better bathrooms; as acts of vandalism still occur (according to my friends even so far as last semester in the Gates Hillman Centers, and last year in Maggie Mo) against gender-inclusive signage. So this project transformed into a campus-wide search for both gendered and gender-inclusive restrooms.
To do this, I borrowed a GoPro HERO9 Black from SoA’s lending center as well as a GoPro harness. I then looked to an online interactive map of CMU’s campus which pointed out areas with single-stall gender-inclusive facilities (compiled by the All-Gender Restroom Access Committee, not really CMU). I wanted to search for locations + experiences I could see any student frequenting + having, like studying in the library, waiting in a classroom, going to a football game, or eating at a dining hall. So by looking both for common experiences + bathroom deserts, this project culminated in 8 total experiences, displayed in a 3 channel format, of me walking to and from bathrooms around campus.
While this project was less technical/computer based than my previous projects (which is a success in my book, since I needed to get my ass away from my computer, according to some), the process was just as long and stressful. There were many points during this project I got lost in the buildings on campus. Inclusive bathrooms were tucked away behind office suite doors, wood shops with chainlink fences, some even in different buildings altogether. I tried to faithfully find these bathrooms by following two rules.
- If there exists a bathroom in the same building as the one you are in currently (according to the map), seek out that restroom. Try to use elevators and ramps, but if there are stairs, note that there are stairs.
- If there does not exist a bathroom in the same building, try to find the closest bathroom (according to the map), and seek out that restroom.
- and keep looking for that bathroom until you find it.
I added in a half humorous/half jarring voiceover which reflected my thoughts while walking, reflecting both my anxiety in trying to find the bathroom but also the helplessness and ridiculousness of the paths I had to take, when all I wanted was to take a piss. A video in particular is a powerful medium because I can show my experience in real time. This is the actual time it took for me to find this bathroom. Now imagine if I really needed to go and watch the video again.
Takeaways:
Overall, I think I was successful with this project given my time constraints (stemming from personal circumstances which led to me missing three weeks of school). Time was not on my side during the production of this project, which in a way was communicated to my classmates during my critique on Sept 29.
I failed in terms of metrics. I initially wanted a pedometer to measure my steps taken, and perhaps a heartbeat monitor to measure my heart rate (I know for a fact it was higher trying to find the single-stall restrooms). A Map detailing the routes I took might have also been nice, but given the time constraints, I reduced this project to just the experience.
I’d do this project again with more time. There’s so many more bathroom deserts than just the 8 I recorded here, and so many metrics I could have added to enhance the experience of watching it.
Hunt Library
300 South Craig Street
Gates Hillman Centers
Doherty Hall
Baker/Porter Hall
Wean Hall
Resnik Food Hall
Gesling Stadium