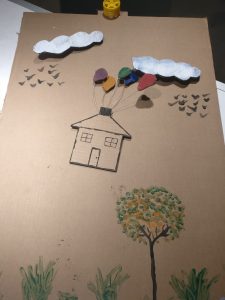
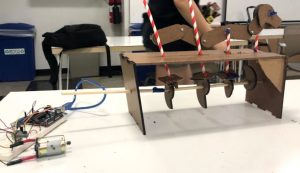
As my initial assignment 4 project (an abstract movement story that involved CAMs) did not end up working, I redid my assignment with a whole different concept and circuit. For my new story, I wanted to have a person be able to fly their own plane across the world, helping them travel to a place far beyond. To illustrate this, I made a DC motor rotate a disk upon which a plane hangs upon a cut out city scape.

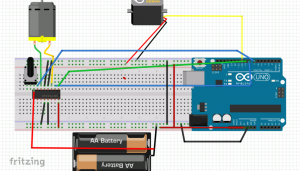
I wanted the user to be able to control the speed at which the plane was rotating, so the user could help the plane “take off” and “land.” Thus, my circuit used a potentiometer and the h-bridge to give the user that level of control over the DC motor.
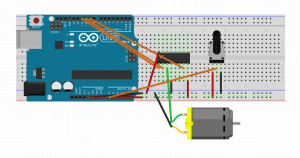
The main problems I had with this circuit was just getting h-bridge to work properly, as I think I had some connectivity issues with the chip and the breadboard. Overall though, this project ended with a visual story I was happy with and wasn’t too involved in terms of circuit debugging.
Final Video: https://youtu.be/G57W0wLsAqc
Arduino Code: Assignment4_Redo
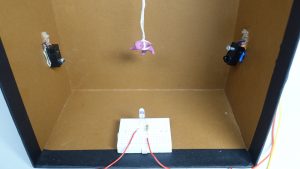
 The situation I planned to portray was: The character approaches to a target treasure (white LED), going down from the ceiling. However, the character touches the security laser beam (expressed through an IR break beam) of the room, then triggers the wire to wind the character back, up to the ceiling. Then, once the IR beams stabilize, the wire will reverse its winding direction, letting the character go down towards the target treasure again. This motion will happen in a loop.
The situation I planned to portray was: The character approaches to a target treasure (white LED), going down from the ceiling. However, the character touches the security laser beam (expressed through an IR break beam) of the room, then triggers the wire to wind the character back, up to the ceiling. Then, once the IR beams stabilize, the wire will reverse its winding direction, letting the character go down towards the target treasure again. This motion will happen in a loop.