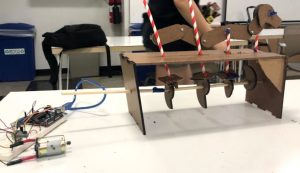
The goal of this project is to use the motor to tell a story. I made a “hungry dragon”, so my dragon would move faster in response to a stimulation (chasing a cat, food placed in front, etc). Movement is shown through rapid rotation of the CAM systems, creating the undulating motion of the dragon’s body.
The stepper motor would turn the dowel with the CAMs, and the speed of the rotation can be varied by a potentiometer. However, there were a few challenges: the motor spins too quickly, the CAMs themselves are too large for the frame made, and decorations could not be completed to satisfaction.
To solve these issues, I can cut smaller CAMs, use off-center CAMs rather than snail or tear CAMs, use longer screws, and make the frame smaller. Some parts of my dragon (or sausage links) have to be stationary to create the undulating motion. To make sure the motion works, I could learn to run a SW animation or do a cardboard prototype. To cut better pieces, I can become more familiarized with bitmaps in lasercutting.
In the future, I also want the stimulation to be more in line with the context (the hungry dragon), rather than having a random potentiometer.
https://drive.google.com/drive/folders/0B6vucT1cFrpgYmppRzA1TmhBb1U?usp=sharing
Even though the CAMs didn’t work, I still think that was a super creative way to create another form of motion with the motors. It also seems to be a pretty complex project involving different types of joints and mechanisms, so it’s understandable that it was difficult to get it working in just one week. For future projects, it might be a good idea to have a back-up project, something that you are confident that you can make work in a short time frame (I had to rely on my back-up project for this assignment, and even then it was still challenging). For this particular project, if you were to keep working on it, I would maybe make the dragon head more detailed? It looked like a dachshund to me upon first impression.