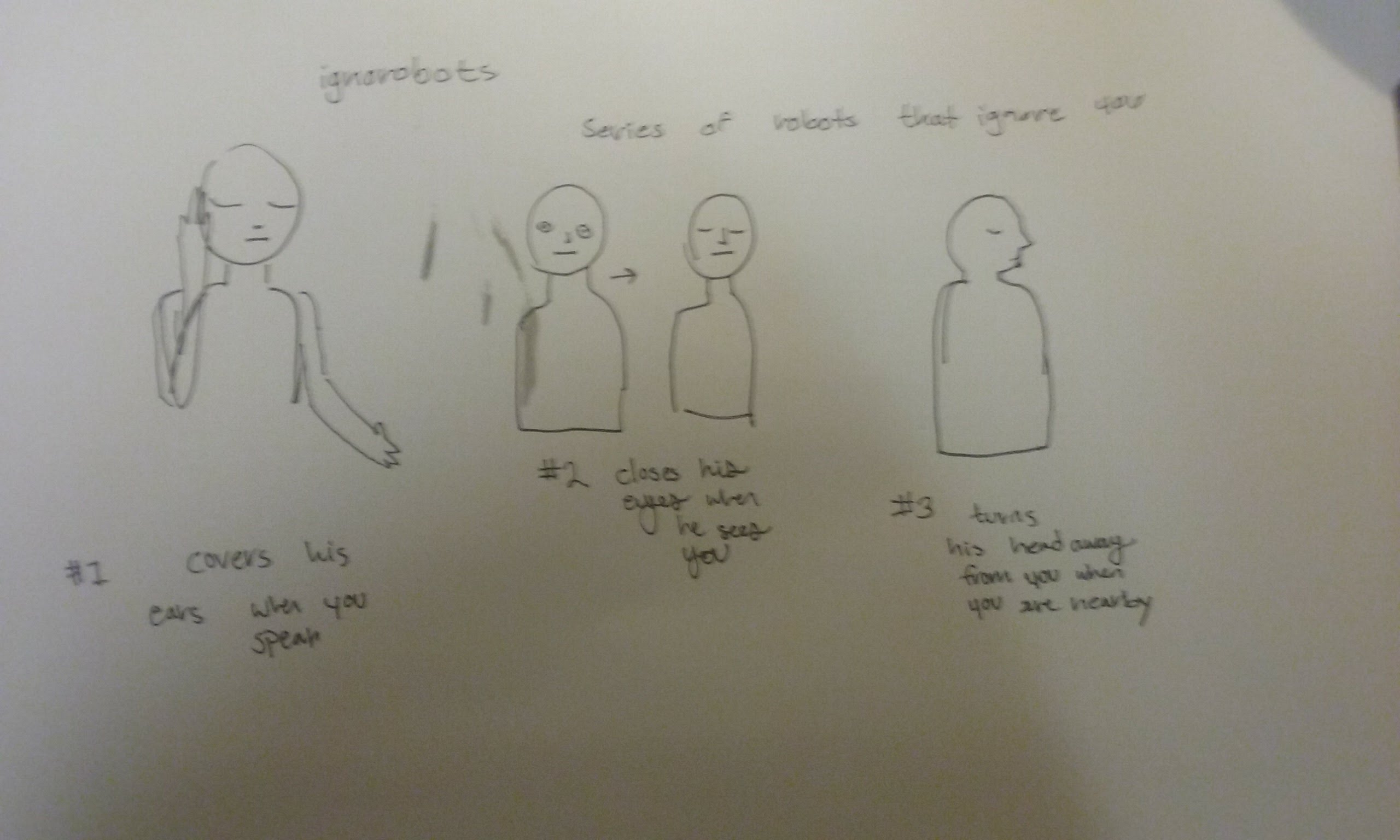
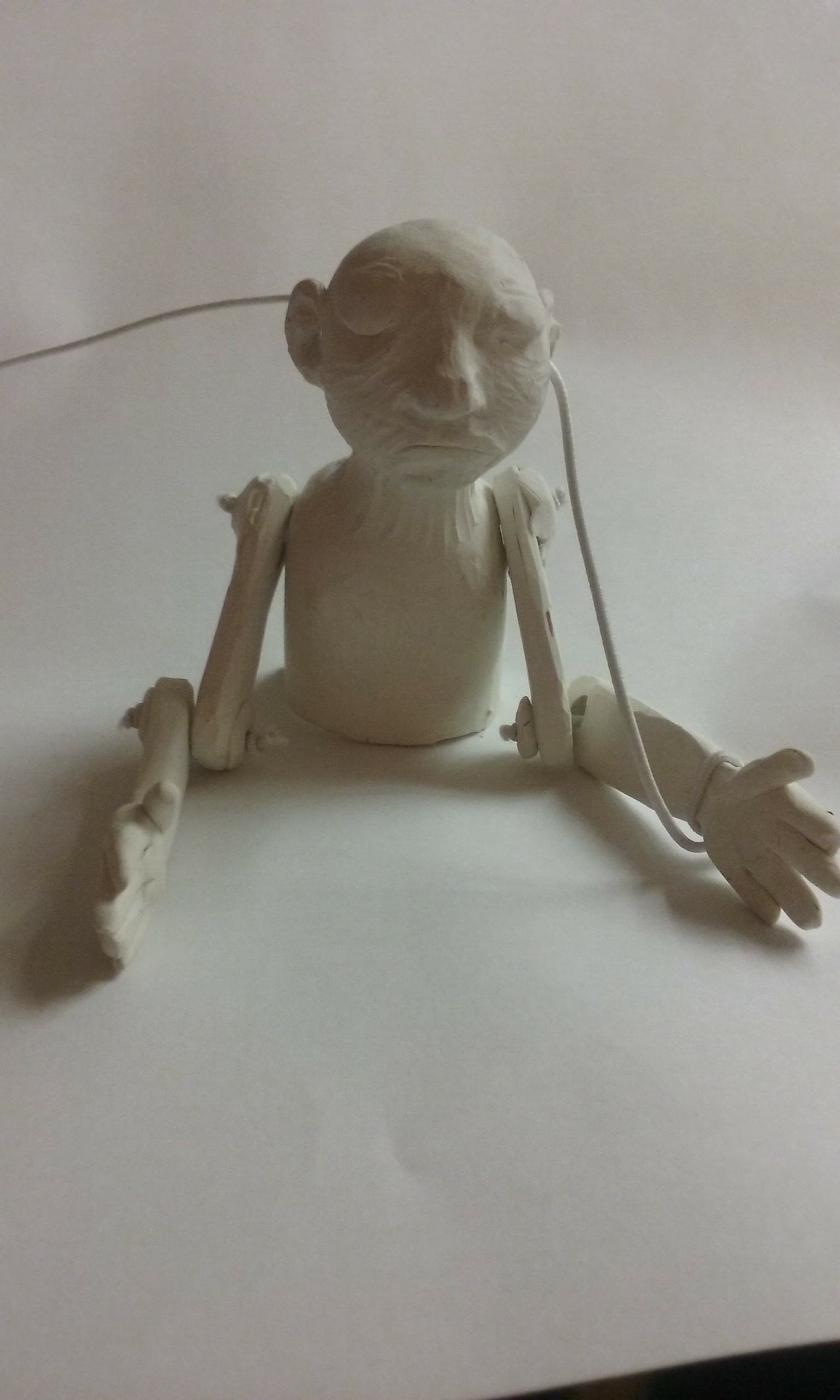
My final project is the first in a set of robots that ignore you.
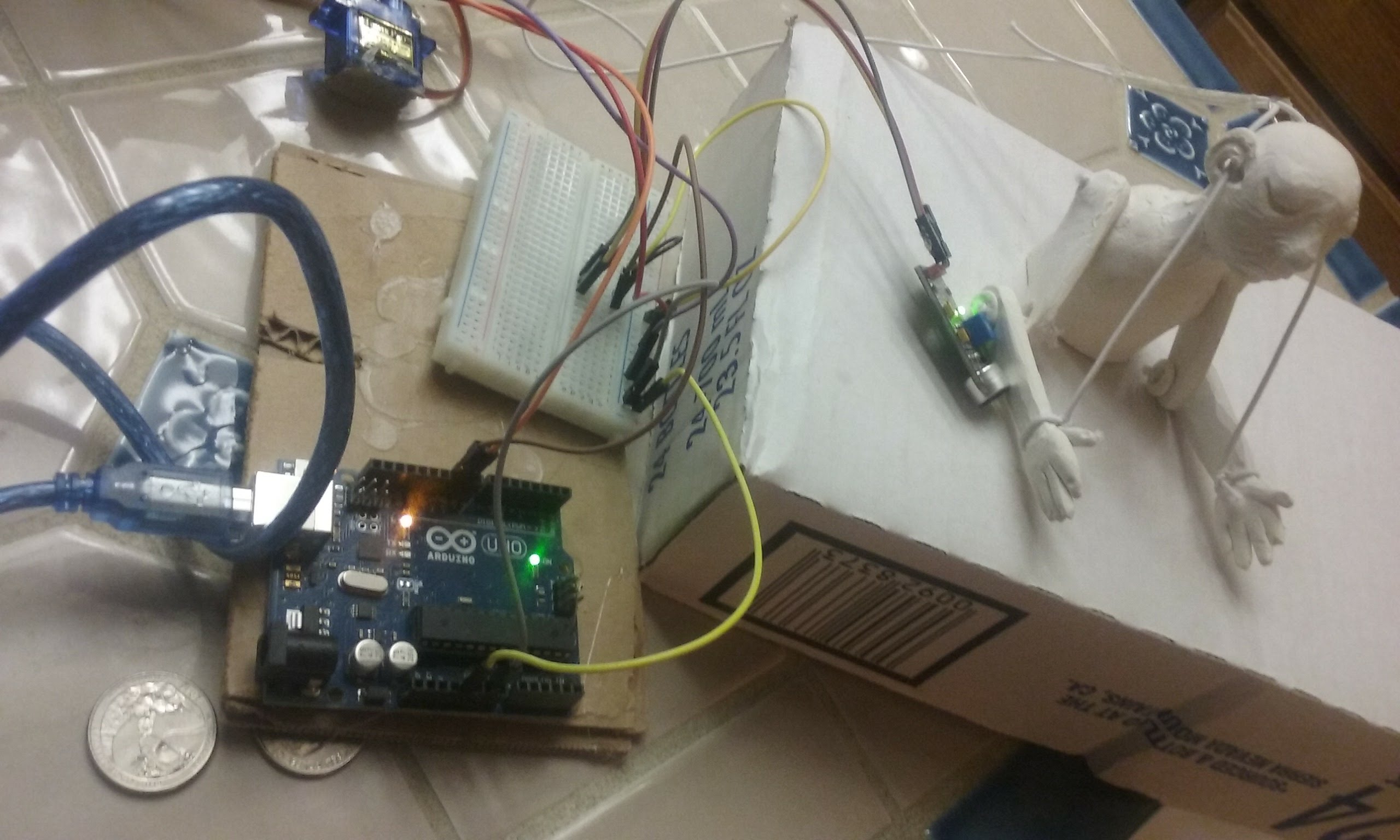
This one, uses a sound sensor to tell if you are talking, and when it hears you, it covers its ears with its hand. The other one shuts its eyes when it sees you, and the final one turns its head away from you.
/*
* Rui Santos
* Complete Project Details http://randomnerdtutorials.com
*
*
* by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include Servo.h;
Servo handMovement;
int pos = 0;
int sensorPin=10;
boolean val =0;
void handsUp(){
for (pos = 0; pos <= 90; pos += 1) {
// in steps of 1 degree
handMovement.write(pos);
delay(15);
}
}
void loop (){
val =digitalRead(sensorPin);
Serial.println (val);
// when the sensor detects a signal above the threshold value, he hears you!! hands up
if (val==HIGH) {
handsUp();
}
else {
handsDown(); }
}
My final project is the Koi fish table. It is basically a Laser Cutter set up. However, I wanted to use wood and acrylic to make the setup so that it would be: 1. cheaper in cost of materials; 2. easier to get materials
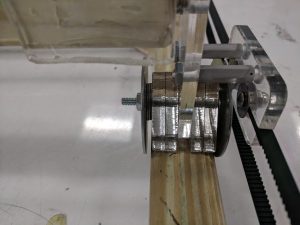
The coponent in this project is consist of 2 stepper motors, 3 timing belts, 3 sets of “wheels”, and several wood beams for the structure.
Here is the setup:
When it is running:
Here is the code:
/*This is the Code for controlling the stepper motors
Some part of the code is adapted from the sample sketch from
"Stepper Test code from Adafruit tutorial
This code might not work with any other shielf but
"Adafruit Motor Shield v2"
----> http://www.adafruit.com/products/1438
*/
#include <Wire.h>
#include <Adafruit_MotorShield.h>
#include "utility/Adafruit_MS_PWMServoDriver.h"
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// Connect a stepper motor with 200 steps per revolution (1.8 degree)
// to motor port #1(M1 and M2) and another one to #2 (M3 and M4)
Adafruit_StepperMotor *motorX = AFMS.getStepper(200, 2);
Adafruit_StepperMotor *motorY = AFMS.getStepper(200, 1);
int motorSpeed = 100; //# rpm
int XYPosMax = 2000; //200 step per rev, 10 full rev max
int XYPosMin = 0; //whole table is a 2000 by 2000 grid
int curPosX = 0;
int curPosY = 0;
int koiDir = 0;
int koiMove = 0;
int moveX = 0;
int moveY = 0;
int yellowPin = A3;
int bluePin = A0;
int greenPin = A1;
int redPin = A2;
int yellowPre = 0;
int yellowCur = 0;
int greenPre = 0;
int greenCur = 0;
int bluePre = 0;
int blueCur = 0;
int redPre = 0;
int redCur = 0;
int threshHoldDiff = 150;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
AFMS.begin(); // create with the default frequency 1.6KHz
//AFMS.begin(1000); // OR with a different frequency, say 1KHz
motorX->setSpeed(motorSpeed);
motorY->setSpeed(motorSpeed);
yellowPre = analogRead(yellowPin);
}
void touchThePond(){
yellowCur = analogRead(yellowPin);
grennCur = analogRead(greenPin);
blueCur = analogRead(bluePin);
redCur = analogRead(redPin);
//yellow here (all same setup, different place
if (abs(yellowCur - yellowPre) > threshHoldDiff){
//yellow is x = 0, y = 0
moveX = curPosX;
moveY = curPosY;
motorX->step(moveX, FORWARD, MICROSTEP)
motorY->step(moveY, BACKWARD, MICROSTEP)
}
//blue
//green
//red
}
void moveKoiRand() {
//First, pick a direction
//Then decide how much wanna go
koiDir = random(0, 4); //0 = +X, 1 = -X, 2 = +Y, 3 = -Y
koiMove = random(50, 401); //small "steps" to mimic fish movement
//
// Serial.print("koiDir = ");
// Serial.print(koiDir);
// Serial.print("; koiMove = " );
// Serial.println(koiMove);
//
// Serial.print("curPosX = ");
// Serial.print(curPosX);
// Serial.print("curPosY = ");
// Serial.println(curPosY);
if (koiDir == 0) {
//check the legality of the position first;
if ((curPosX + koiMove) >= XYPosMax) {
moveX = XYPosMax - curPosX; //move to the edge
}
else {
moveX = koiMove;
}
// Serial.print("in case 0, moveX= ");
// Serial.print(moveX);
motorX->step(moveX, BACKWARD, MICROSTEP); // moving +X is
curPosX += moveX; //update the new position data;
// Serial.print("in case 0, curPosX= ");
// Serial.println(curPosX);
}
if (koiDir == 1) {
if ((curPosX - koiMove) <= XYPosMin) {
moveX = curPosX;
}
else {
moveX = koiMove;
}
// Serial.print("in case 1, moveX= ");
// Serial.print(moveX);
motorX->step(moveX, FORWARD, MICROSTEP);
curPosX -= moveX;
// Serial.print("in case 1, curPosX= ");
// Serial.println(curPosX);
}
if (koiDir == 2) {
if ((curPosY + koiMove) >= XYPosMax) {
moveY = XYPosMax - curPosY; //move to the edge
}
else {
moveY = koiMove;
}
//
// Serial.print("in case 2, moveY= ");
// Serial.print(moveY);
motorY->step(moveY, FORWARD, MICROSTEP);
curPosY += moveY;
// Serial.print("in case 2, curPosY= ");
// Serial.println(curPosY);
}
if (koiDir == 3) {
if ((curPosY - koiMove) <= XYPosMin) {
moveY = curPosY;
}
else {
moveY = koiMove;
}
// Serial.print("in case 3, moveY= ");
// Serial.print(moveY);
motorY->step(moveY, BACKWARD, MICROSTEP);
curPosY = curPosY - moveY;
// Serial.print("in case 3, curPosY= ");
// Serial.println(curPosY);
}
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println("Microstep steps");
moveKoiRand();
}
Design of the “Wheel”:
General Idea/Assembly
For the Koi fish holder part
Reflection:
The really hard part of this project is to make the mechanical setup. I spent more than a week working on solidworks. However, the setup is too big and not as percise as I hoped it would be. Therefore, there are a lot of problem while working in the wood shop initially. Later I gave up on following soliworks, and just try and test laser cutting and wood working.
Another part that is complicated is to make the stepper work. The Arduino shield is nice, for controlling the stepper. The libaray it came with helps me to reduced a lot of time for me trying to figure out how to work with stepper (even though it still took a long time for me to understand how stepper works). The other problem that I faced is that the stepper doesn’t come with avaliable datasheet (I coudn’t find anything). However, the shield was nice enough that I tried out a few different voltage input using a controllable power output for the stepper. Finally, I found out that the stepper needs 1.5A at 5V which is a lot higher than normal power supply. At last I used 2.4A at around 8V to power the stepper to make sure it can over come the friction it might experience.
The problem that I didn’t really solve in this project is how to change the stepper speed. Even the Adafruit library include speed settings, the stepper speed couldn’t be changed for some reason.
If I were to do this project again, I will add a set of caliberation setting. I will mount limit switches on the zero of X and Y axis. So I don’t need to hand calibrate to zero position everytime it restarts. However, that need me to figure out how to program the stepper to move without having to tell it how much it needs to move.
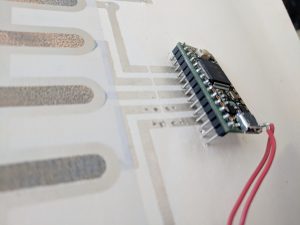
Screen printing has been an influential and power medium of communication for about 1000 years. This basic touch-test shows the medium can be turned into a method for interactive communication.
This piece displays an interactive light up screen print attached to the polyester stencil that was used to print the circuit. A Teensy 3.2, two triacs, and a DC-AC inverter power source created the artwork.
The screen is used to hold each component in place and display each shape layer of the printed circuit
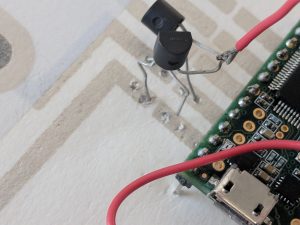
The power source, run from two AA batteries, produces ~200 volts AC. The Teensy runs from a separate power source. Triacs, a component that acts as a transistor to switch on or off AC, is attached to the Teensy for modulation, and bridges the printed light up segment to a ground.
This piece attempts to use the ink circuitry to press-fit the Teensy to the wires that connect to the triacs
This method is unreliable because the paper stretches and loses electrical connection quite easily.
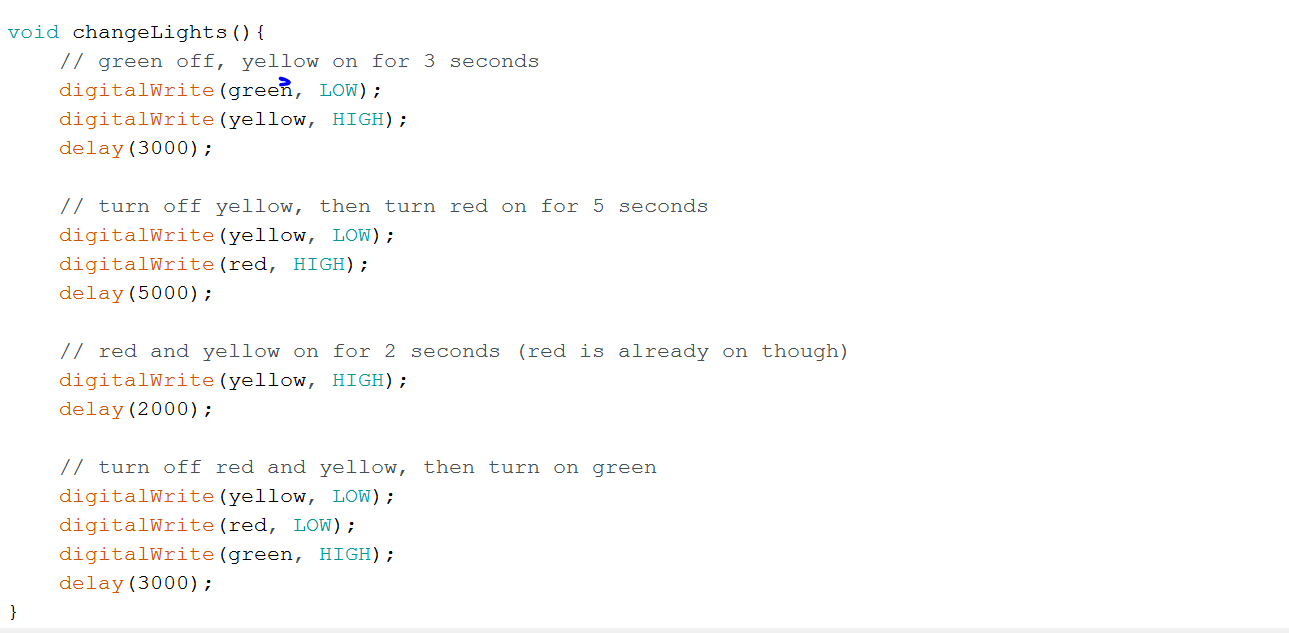
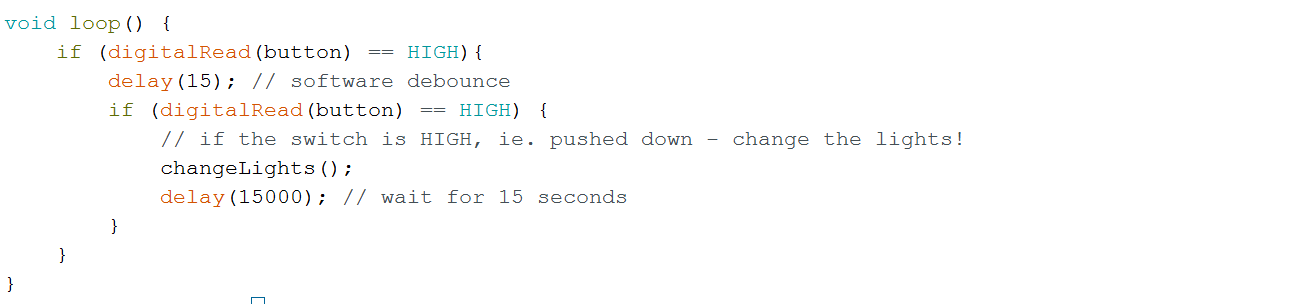
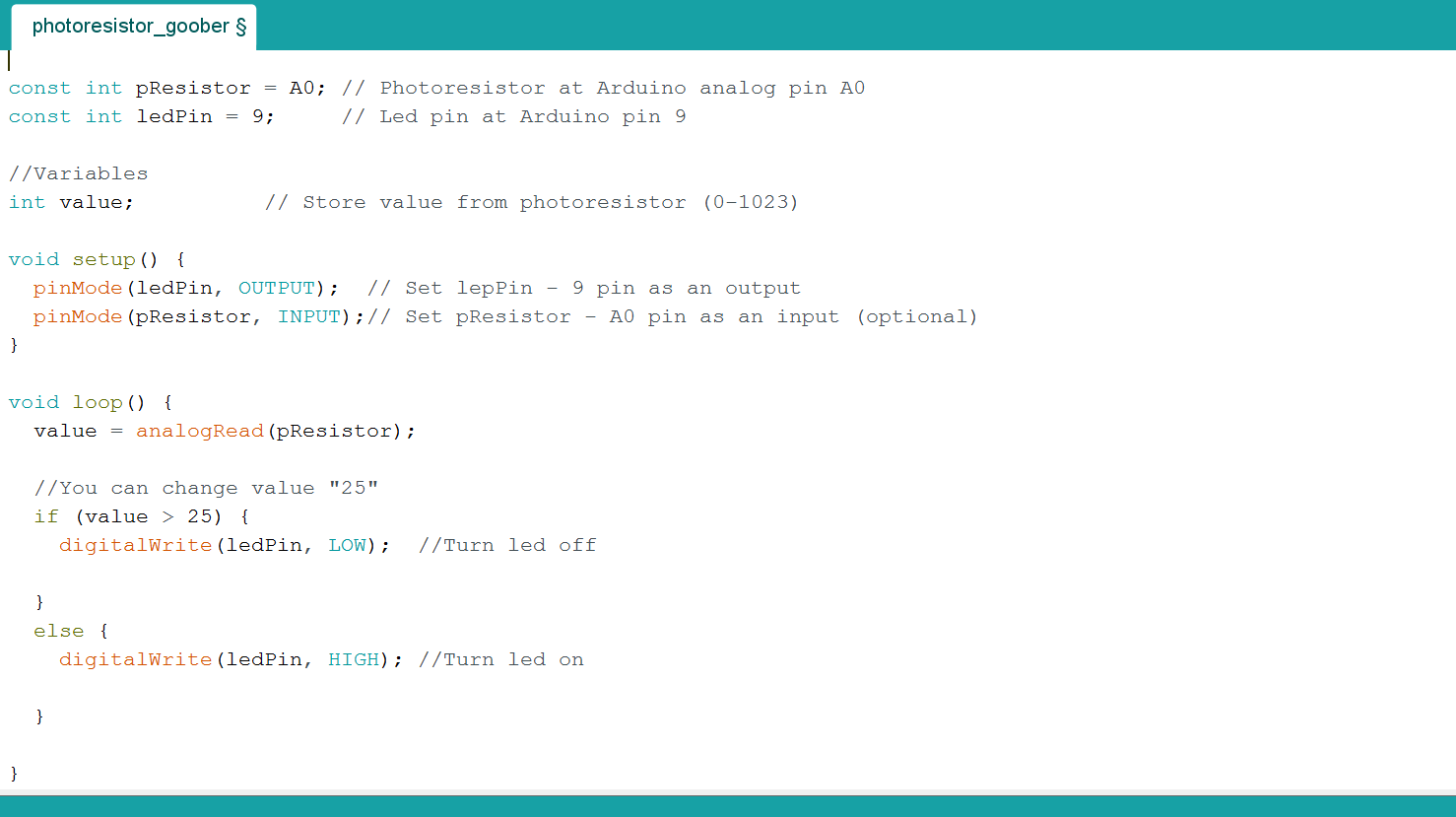
So for Assignment 2, I decided to make a traffic light type thing. It has four states: Red, yellow, green, and off. It automatically changes in the code because of the delay (look below)
For this assignment, I thought about how I could incorporate light and emotion, simply because I wanted to experiment with LEDs. It got me thinking about how people in your life enhance your emotions and can affect your personality.
“Light up my life”
This then got me thinking about a system that requires another person to work, similar to how friends and people can figuratively light up your life.
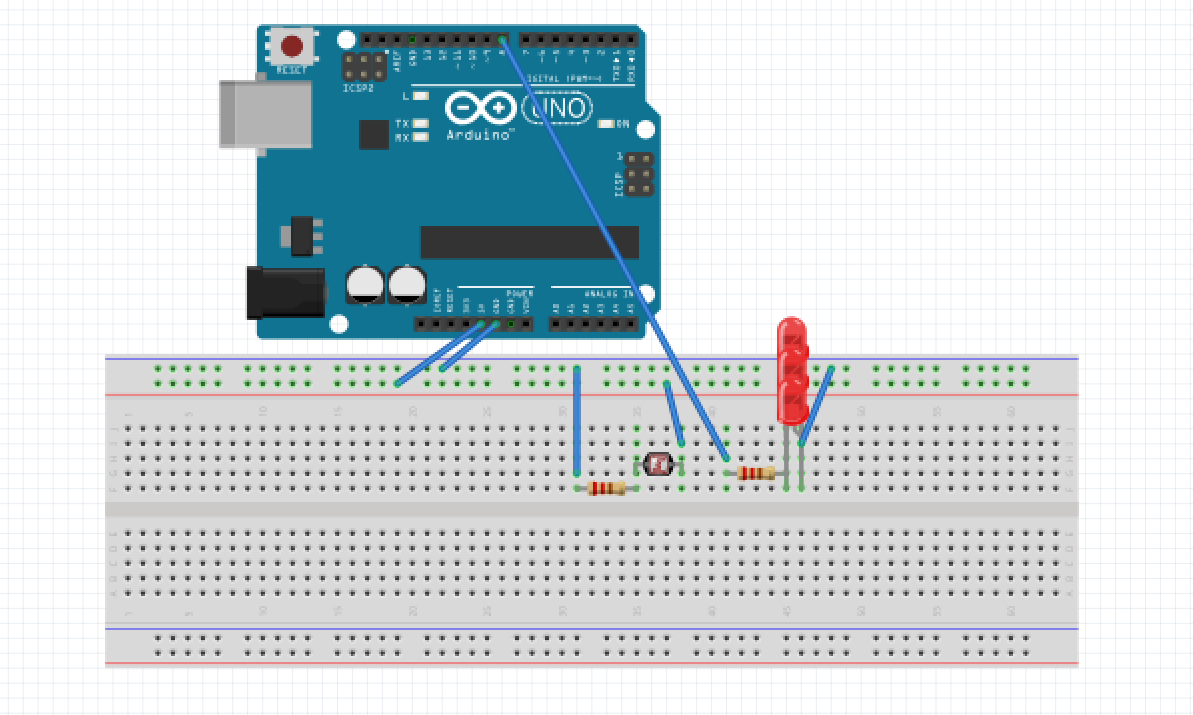
The concept: A garment that can be worn and connected to a sensor that when a buddy interacts with it, controls the lights on the garment.
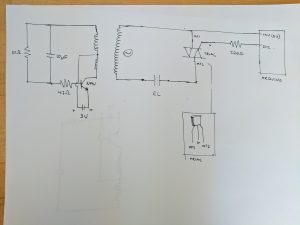
Materials:
White 3.3V LEDs
photoresistor
breadboard
Arduino UNO
10K resistor
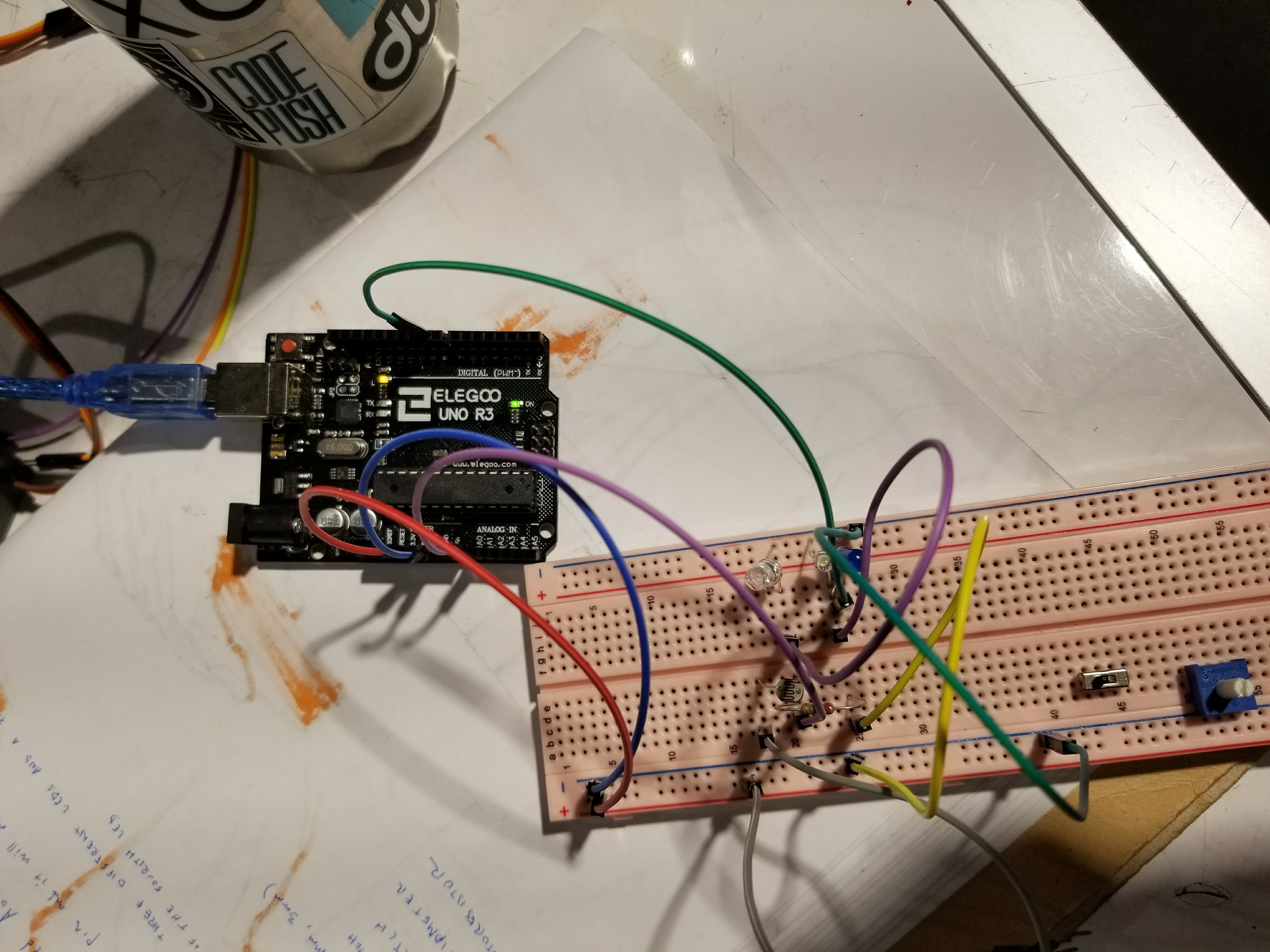
Circuit:
Code:
Final:
I lasercut a pattern on the sleeve of the garment for the LEDs to backlight and it came out pretty well. It was my first time cutting denim and I definitely learned alot.
Some issues, I came across included how to hook up multiple LEDs and also how to keep the intricate cut from literally falling apart. In the end, I taped the LEDs to the interior of the garment. I then connected the photoresistor to a long cable so it could be used further away.
I set out to make some kind of machine that could draw using XY coordination, with the idea that it should also have interchangeable drawing heads, some of which would also have motorized components of their own (for example an attachment that would swing a drawing pencil back and forth in strokes, while itself being moved through XY axis plotting). I also wanted to program the machine such that it could be controlled with manual knobs, programmed with patterns to follow, or set to follow a vector image file.
I didn’t achieve all of these things, but I did assemble a functional XY axis plotter from scratch. One thing I vastly underestimated was the amount of time it would take to make, test, and adjust the mechanical components of the machine (that is, almost the full time of making the project). I also had trouble with getting the right kinds of motors, the first one I used wasn’t actually a stepper, and I had to cut it out and replace it. Then I found that the motors I had finally put in were not 360 degree steppers, which is what I really needed to have the components move back and forth as far as they were physically able, so the machine’s full plotting range was smaller than intended.
I also went the quick and dirty route, using cut cardboard and hot glue, pulley systems made with bolts as axels and makeshift sprockets rigged out of shaped wired. This meant the machine stuck and jittered a lot. In some ways this was expected, and also a happy accident. Any 3D printer or similar plotting apparatus could give me close to perfect XY movement, but this machine was more… shall we say, personal. No matter how well the XY plotting software was made, any drawing it made would be filled with mistakes where the marker caught on the paper, or the carriage got stuck for a moment, or the fishing line didn’t engage with the top motor as strongly as the bottom one. This I think makes for a more artistically interesting interaction between machine and mark making. I want this thing to be obviously incapable of drawing anything like a person could. I want it to draw in a way that only a fucked up robot could. I think if I tried to make a similar thing in the future I would make it out of dumber and more intentionally haphazard materials.
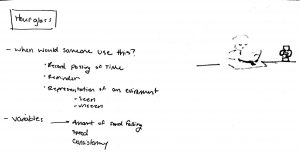
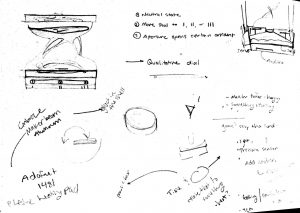
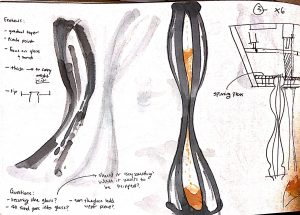
My final concept is a representation of time as an organism. This responsive hourglass changes how fast time passes when you ‘notice it’. This is done using an IR sensor that interprets distance as a specific state. This state causes a servo to move a specific distance and change the diameter of an aperture. This would then affect the speed in which the sand falls out of the glass.
Unfortunately I was not able to get the entire piece working. There is a structural issue that I did not realize until the entire piece was together. Although the mechanics and code work, the weight on the aperture requires a lot of force from the servo. Even though I tried different sized servos, none were strong enough to move the latch of the aperture.
I blew a few glass forms to be used to hold the sand. I had to trim them in order for the sand to travel through both ends. Unfortunately I had to simplify my concept and have it exist in only one state. I had to make a lot of form adjustments after blowing the glass. This caused a lot of constraints because of the strength of the glass and how it could connect to the rest of the form. In addition, my intention was for the glass to be larger, so the form that holds the arduino would not feel so large in comparison.
I then turned grey foam on the lathe in order to create the conical form. The inside was carved out using the lathe as well. I had to plan out the form ahead of time so the glass form would be a snug fit and so the taper is proportional to the form. The bottom circle was then measured so the laser cut aperture would fit on the base. Luckily the pins fit well into the foam and helped to keep everything snug. Although the initial plan was to turn the bottom form that would hold the Arduino, servo and battery, I ended up vacuum forming a plastic into a conical shape. This material is easy and flexible to work with, and allows me to reopen the casing if the mechanism stopped working for some reason.
I also needed to plan for an area where the sand could fall without getting to the Arduino or servo. The proved to be practically impossible because I still needed holes for the IR sensor and servo to access higher pieces. I also had to test out many ways and materials so the servo could access the aperture. I ended up using string to connect the two because it had strength and tension while being flexible to move through snug areas of the mechanism. Unfortunately at the end of the day the servo was still not strong enough. In the future I would find a way to distribute the weight of the glass more on the borders of the aperture so the joints would not have as much difficulty moving. I also would try to use larger grains of sand, maybe even ball bearings of some sort so there’s no chance the particle would interrupt the mechanics. Now that I have a better understanding of the overall necessary mechanics, I would want to iterate on the form to it it more conducive to standing and laying down (and not look like it would be dangerously knocked over and break).
My project was to create corresponding colored gloves to alter light in an environment. Initially I wanted to make something large scale where a room could detect what color clothing you are wearing and adapt accordingly. Unfortunately due to time a feasibility I had to scale down the project. I went through trial and error to incorporate a phillips hue and a particle photon but after much chagrin I had to use a RGB LED strip. Each of the gloves will trigger the lights to change to what ever color the glove is. I used imbedded RFID tags in the gloves.
My final project is a cosplay prop from the game Transistor, that uses phys comp fundamentals to bring the prop closer to functions/behaviors in its original work, enhance static features, and bring others to engage with the great works that these props come from.
The first stage was focused on code and learning more about using physical computing components like transistors and capacitors to deliver consistent power to the circuit and read noisy signals. High pass filter methods were used to find the most effective way to read and pulse the LED with. Different conditional loops and commands such as “return”, “goto’ and “switchCase” were also explored to achieve the conditional cases I wanted to program for:
Corrupt Mode: When the sword is lowered from the stand, sword point touches the group and pressed a momentary switch down. The switch reads LOW because the circuit moves voltage from 5 V to ground. The switch is connected to a pin and the Arduino executes a command to fade from blue to red LED strip color, and stay within the red state while the button is pressed.
Normal Mode: Pulse in blue light while second (auxiliary) momentary switch is also pressed.
Push buttons are used in conjunction with if statements.
Booleans and return functions were considered as ways to control when the pulse sensors was activated and taking in inputs, but a momentary switch was the better option because it was a mechanical switch not dependent on the code for the pulse sensor to avoid reading noise.
Much of the difficulty was with prototyping outside of a breadboard- soldering with large lengths of wire and attaching buttons in the absense of pre-existing holes created a building difficulty. The pulse maker has to be strong through the silver hilt, which was not formerly anticipated. I also had a lot of difficulty with making a pushbutton work that did not have 4 prongs (2 prongs only).