After much thought and discussion with friends, I decided to make a project that focused on the emotion of nervousness.
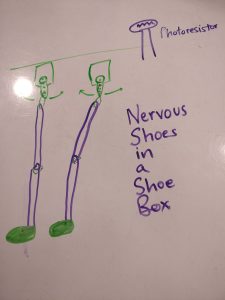
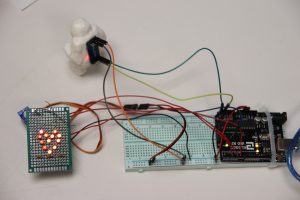
The idea was to create two legs with shoes attached on them that “walk” in the same place by their attachment to two servo motors. A photoresistor would be placed such that it is able to pick up when a shadow is cast on the project and someone is getting close to it. The closer the person gets, the more nervous the legs get, and the faster they move.
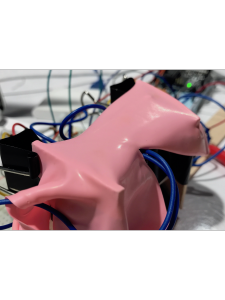
I made the legs out of Popsicle sticks and connected them with wire. The shoes were made of tiny red balloons.

Once I made a working prototype, I felt the shoes needed an environment to walk in. I painted the background to represent a dark and starry night. In our world today, walking alone at night is associated with nervousness.

Through this project I learned a great about the conceptualization process of a project. If I were to do this project again, I might learn how to laser cut and create better parts for the project.
This is a video of the working project:
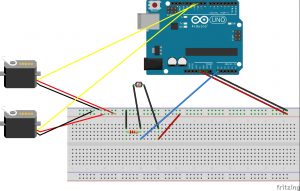
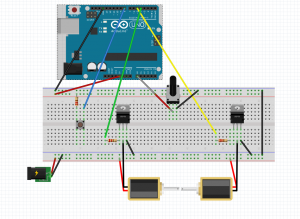
Fritzing of the circuit: