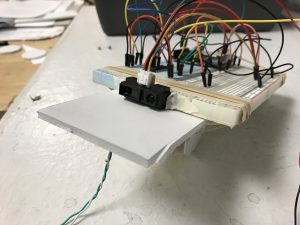
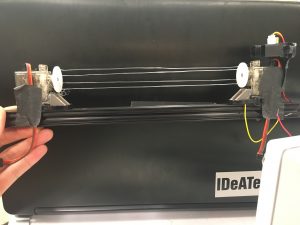
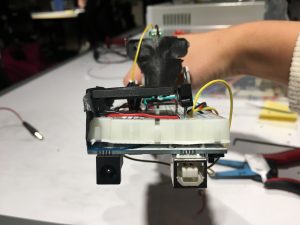
After prototyping the capactive sensors and the polyphonic function I went about creating an enclosure for the full piece. I lazer cut and engraved a small box to fit in the palm of ones hand, and added a strap for security and comfort. It’s not the most ergonomic thing in the world, but it functions…
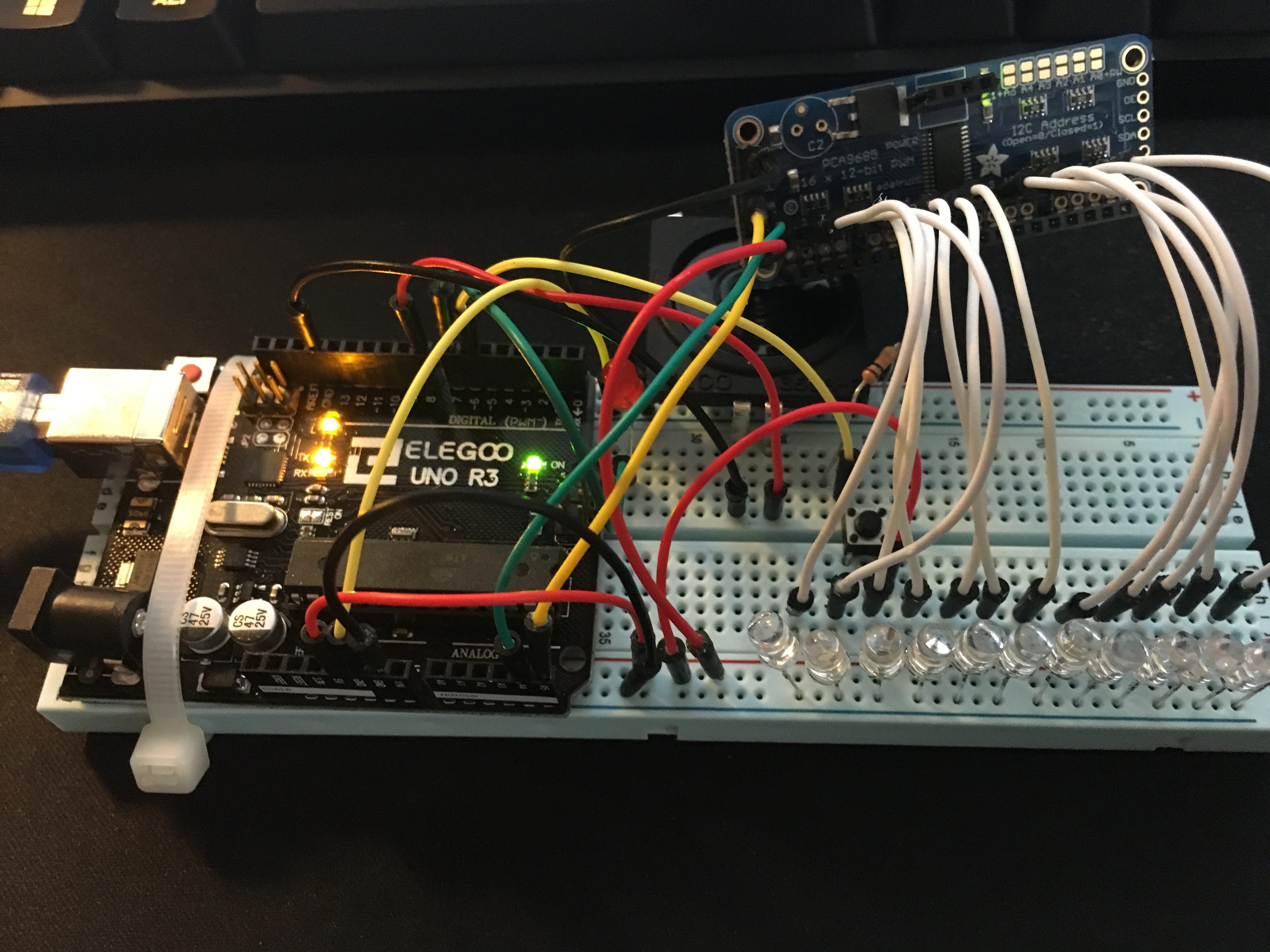
I ran into extensive problems with the capacitive sensors and wiring. Hopefully someon can exlpain this to me, but for some reason whenever I used wires longer than about ~6 inches they would begin to trigger from the proximity to the power wire. I then took apart the box and added another slot to run the sensor wires through, this proved also innefective as I ran into the same problem with longer wires. If I had more time I would have set up the whole thing inside the box, but at this point I had already taken it apart several times and was doubtful I could fit everything inside this small of a form factor. I settled for being able to hold the thing, and just not move around too much.
It has a volume control on the breadboard, and you can switch notes and key by changing the pins the wires go into.
I was unable to integrate the 3axis accelerometer for the other hand, but I’m happy with the piece as it is.
Happy to demonstrate in class!
https://drive.google.com/file/d/0By_HygQXfEhJZDRTM2c5UWFmYWc/view?usp=sharing

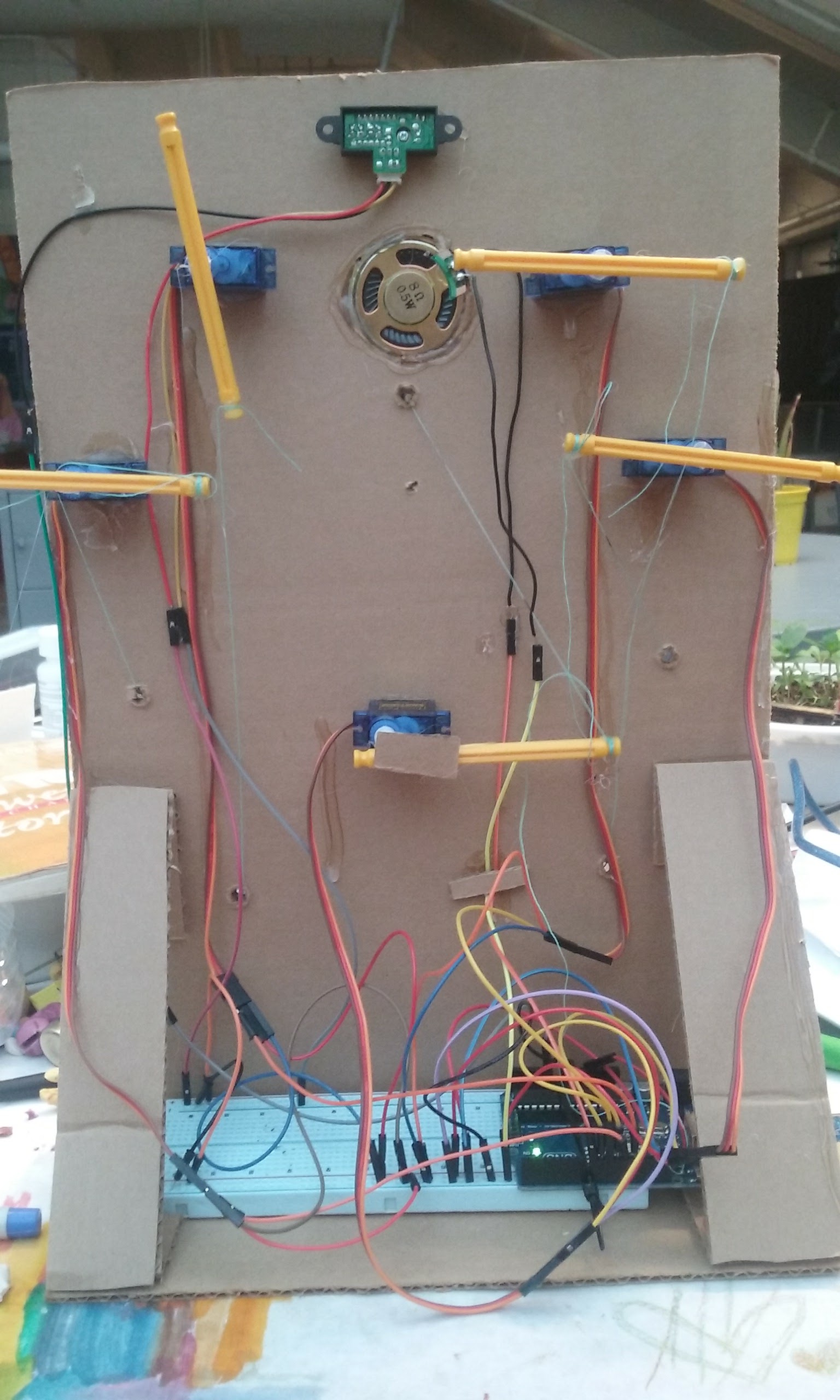

 nds. I found a baby doll at a local goodwill and from there took its built in button and dialog and rewired it into my bread board in order to use the switch to trigger its pre recorded sayings as well as my components. When its foot is pressed a speaker in its back will begin to let out a wailing sound as a servo begins to turn its head 360 degrees. It will spin until the sound ends. Each time you press the foot you also get a creepy randomized saying from the baby (that of which came with the doll). If I were to do it over again I would have tinkered with the speaker I added and mess with the frequency. Secondly I wish I resolved the head rotation so that every 2 times you press its foot the head will come around to its original forward facing position, now it ends where ever the sound stops.
nds. I found a baby doll at a local goodwill and from there took its built in button and dialog and rewired it into my bread board in order to use the switch to trigger its pre recorded sayings as well as my components. When its foot is pressed a speaker in its back will begin to let out a wailing sound as a servo begins to turn its head 360 degrees. It will spin until the sound ends. Each time you press the foot you also get a creepy randomized saying from the baby (that of which came with the doll). If I were to do it over again I would have tinkered with the speaker I added and mess with the frequency. Secondly I wish I resolved the head rotation so that every 2 times you press its foot the head will come around to its original forward facing position, now it ends where ever the sound stops.