My final concept is a representation of time as an organism. This responsive hourglass changes how fast time passes when you ‘notice it’. This is done using an IR sensor that interprets distance as a specific state. This state causes a servo to move a specific distance and change the diameter of an aperture. This would then affect the speed in which the sand falls out of the glass.
Unfortunately I was not able to get the entire piece working. There is a structural issue that I did not realize until the entire piece was together. Although the mechanics and code work, the weight on the aperture requires a lot of force from the servo. Even though I tried different sized servos, none were strong enough to move the latch of the aperture.
Code and Fritzing: sketch_assignment-08-hourglass-brennan
Process:


I blew a few glass forms to be used to hold the sand. I had to trim them in order for the sand to travel through both ends. Unfortunately I had to simplify my concept and have it exist in only one state. I had to make a lot of form adjustments after blowing the glass. This caused a lot of constraints because of the strength of the glass and how it could connect to the rest of the form. In addition, my intention was for the glass to be larger, so the form that holds the arduino would not feel so large in comparison.


I then turned grey foam on the lathe in order to create the conical form. The inside was carved out using the lathe as well. I had to plan out the form ahead of time so the glass form would be a snug fit and so the taper is proportional to the form. The bottom circle was then measured so the laser cut aperture would fit on the base. Luckily the pins fit well into the foam and helped to keep everything snug. Although the initial plan was to turn the bottom form that would hold the Arduino, servo and battery, I ended up vacuum forming a plastic into a conical shape. This material is easy and flexible to work with, and allows me to reopen the casing if the mechanism stopped working for some reason. 

I also needed to plan for an area where the sand could fall without getting to the Arduino or servo. The proved to be practically impossible because I still needed holes for the IR sensor and servo to access higher pieces. I also had to test out many ways and materials so the servo could access the aperture. I ended up using string to connect the two because it had strength and tension while being flexible to move through snug areas of the mechanism. Unfortunately at the end of the day the servo was still not strong enough. In the future I would find a way to distribute the weight of the glass more on the borders of the aperture so the joints would not have as much difficulty moving. I also would try to use larger grains of sand, maybe even ball bearings of some sort so there’s no chance the particle would interrupt the mechanics. Now that I have a better understanding of the overall necessary mechanics, I would want to iterate on the form to it it more conducive to standing and laying down (and not look like it would be dangerously knocked over and break).





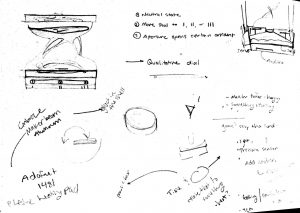
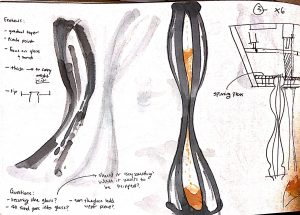
Sketching and Planning: assignment-08-hourglass-sketches-brennan