![[OLD SEMESTER] 15-104 • Introduction to Computing for Creative Practice](wp-content/uploads/2023/09/stop-banner.png)
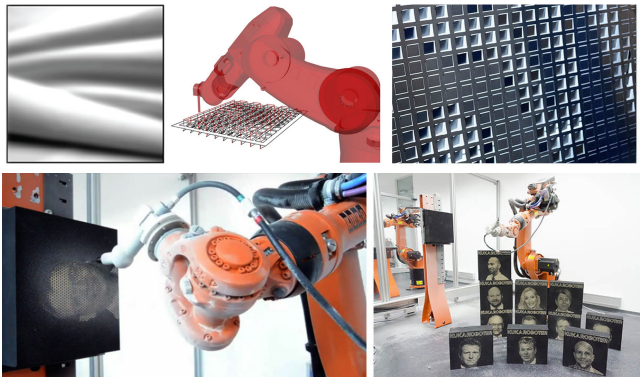
The project that was really inspirational for me was the ‘real time robot simulation and control for architectural design’. Many factors attracted towards this project, as it was something that was happening in real time and improving lives and the built environment. I really liked the way architects made use of the multifunctional nature of robots, I was not aware that robots had a lower cost than that of actual workers. I was also fascinated by how these tasks were accomplished with pristine accuracy by employing simple algorithms. Using grasshopper to create computational design was something that really fascinated me. The paper/project is targeted towards introducing robots in the field of architecture and how useful they might be when employed correctly, via using algorithms and peeking intuitively. I do not know much about the algorithms that generated these designs or are responsible for computational design in architecture, but I do know that grasshopper is a key
tool in this task, and I have a little experience using grasshopper. Grasshopper has a relatively easy and understandable interface and generates algorithms that in turn projects 3 dimensional computational design of Rhino. The final project is an example of what a computational fabrication environment is able to achieve, thus, a proof of concept and mass customization.