Biologically Inspired Engineering, Harvard
University, Cambridge, MA
A design strategy that takes a kinematic trajectory as its input
and uses analytical modeling based on nonlinear elasticity and
optimization to identify the optimal design parameters for an
actuator that will follow this trajectory upon pressurization.
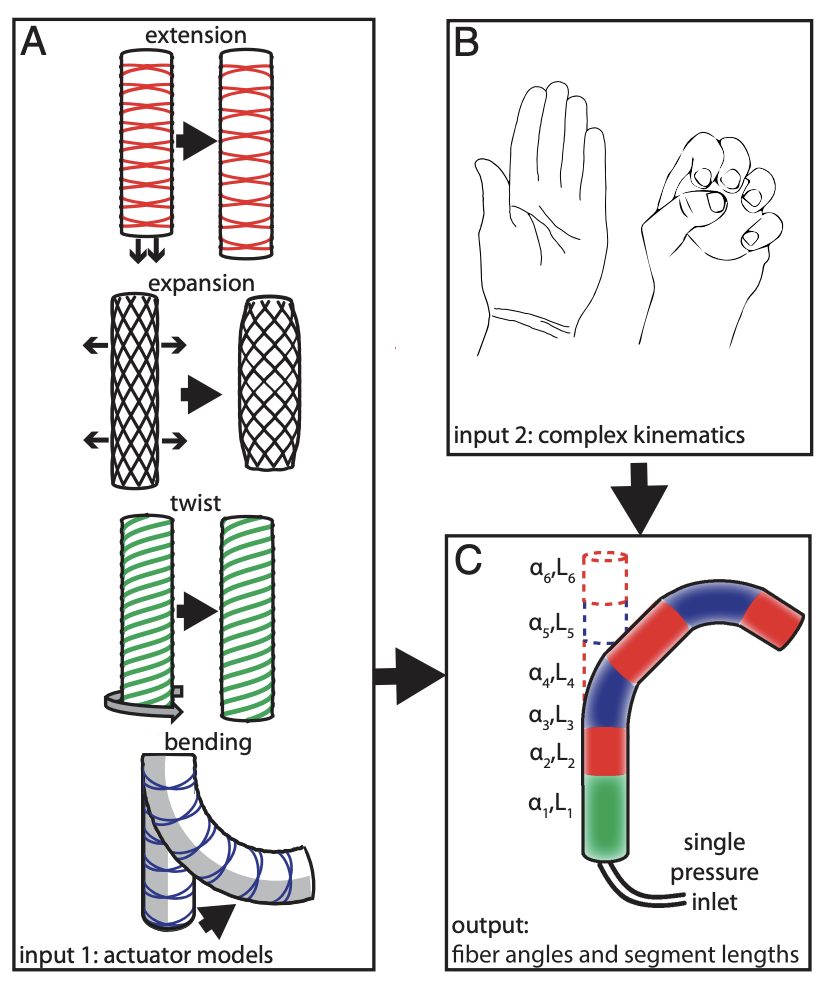
(A) Analytical models of actuator segments that can extend, expand, twist, or
bend are the first input to the design tool. (B) The second input to the design
tool is the kinematics of the desired motion. (C) The design tool outputs the
optimal segment lengths and fiber angles for replicating the input motion.
Videos.
- What feature of the work could we specifically evolve into a technique for wearable kinetic sculpture or costume?
Using fiber reinforced air pouches to control the shape that a pneumatic actuator makes. Offers many possibilities for complex output motion using a simple control input.
- What details of the artwork or concept are not immediately apparent and how do they inform the work?
The work is more of a proof-of-concept, and there aren’t explicit applications that are supplied. The fiber reinforcement of the pneumatic pouches are not apparent in the way they will perform – thus they offer an element of surprise.
Similar approaches:
Fibers do the work!
Application
Additional Resources
Leave a Reply
You must be logged in to post a comment.