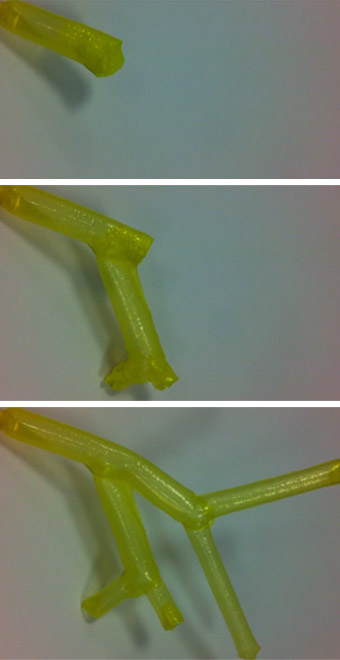
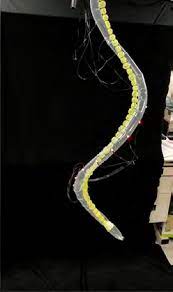
We were able to test and design a few works-like prototypes in order to get the mechanisms for our final project figured out. In class, we were taught how to start with a straight design, pump it up with air, and alter the shape to be curved or wavy. Our objective for one prototype is to start with a curved design and once filled with air, it would straighten. This was achieved with elastic as shown in the image on the left (thanks to Olivia for her guidance). Then we also used a similar design to the Stanford Vine Robots, where a straight tube is surrounded by a sectioned-off plastic tube. With each tube glued to the straight tube, when the tube inflates, it creates a helix shape as shown in the image on the left.
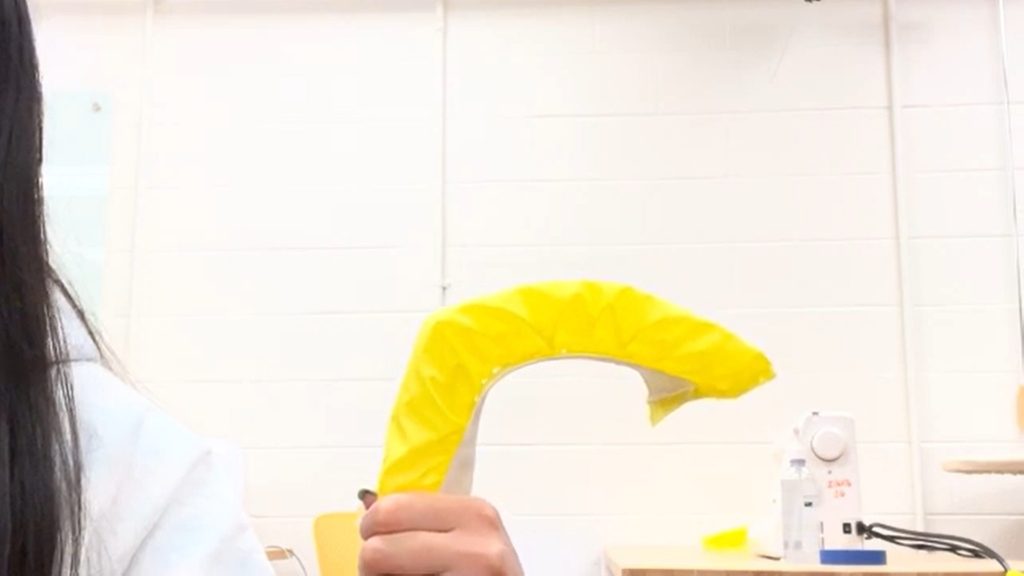
Our last and favorite prototype was created and inspired by Olivia. Using a large fan to inflate a tube, we would pull a string so that the top of the “plant” would shrink and grow on command. This is demonstrated in the video below.
Prototypes
Elastic 
Wrapping
Inspirations
Carnivorous plant:


Vine Robot:

Leave a Reply
You must be logged in to post a comment.