![[OLD FALL 2020] 15-104 • Introduction to Computing for Creative Practice](../../../../wp-content/uploads/2021/09/stop-banner.png)
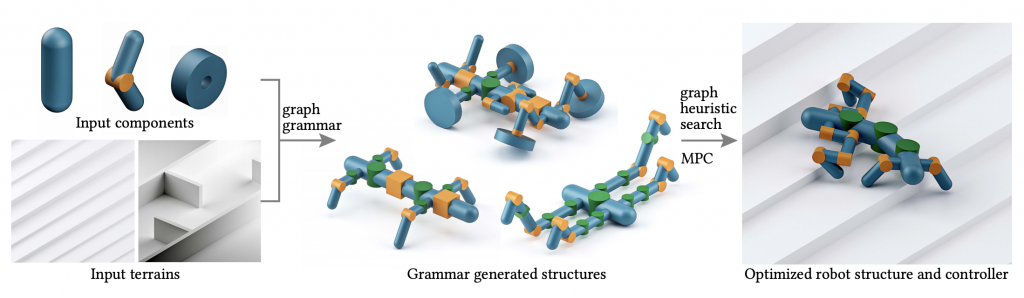
A project I found to be inspirational was a project done by ALLAN ZHAO, JIE XU, MINA KONAKOVIĆ-LUKOVIĆ, JOSEPHINE HUGHES, ANDREW SPIELBERG, DANIELA RUS, and WOJCIECH MATUSIK, called RoboGrammar. This project is an approach to generate different robot structures that is able to move along various terrains. This project is admirable because they were able to come up with a small set of rules that can describe the hundreds and thousands arrangements of physical robot assemblies. While the rules or grammar supports many types of physical arrangements, it also limits the design space to designs that can be physically produced. I thought this related to programming because through assembling a code that supports the randomness of the variations while also setting limitations, a rule is formed that the project follows.
https://cdfg.mit.edu/publications/robogrammar-graph-grammar-for-terrain-optimized-robot-design