Here is the video:
https://drive.google.com/file/d/0B0lS0mmjvCWPZ0dINVZzdFhxQlE/view?usp=sharing
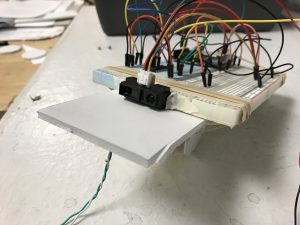
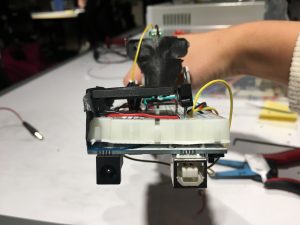
After first round of prototyping, I decided to make the device hand-held instead of connecting to the power box. 
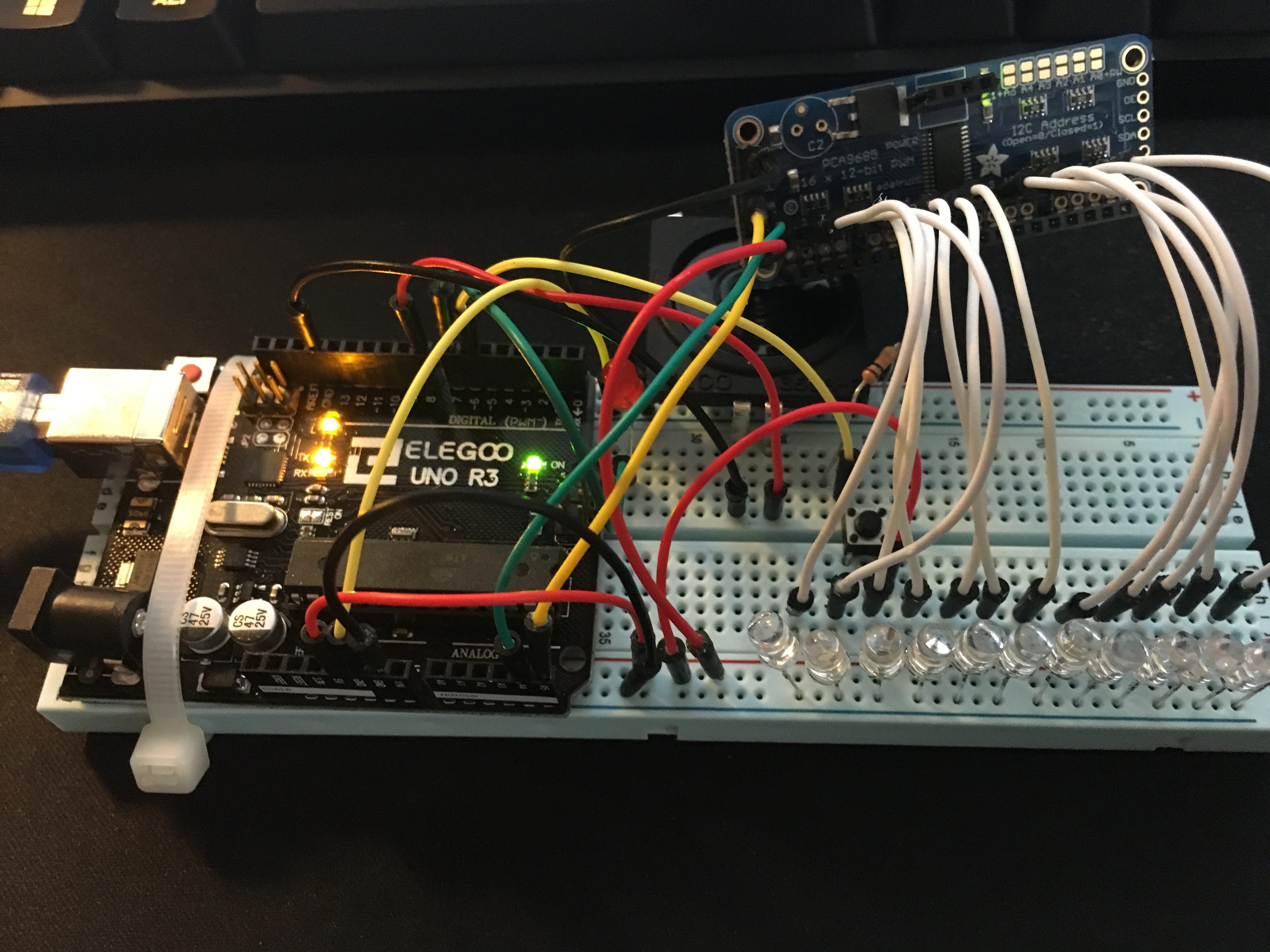
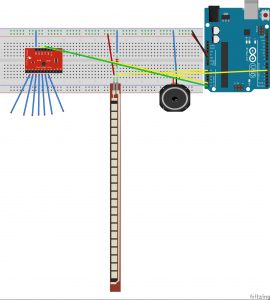
So I decided to tape the arduino board on the back of the breadboard and use a 9V battery. The plan is to power the speaker and IR sensor using the Arduino and to power the two servo motors by the 9V battery. This means I need to plan out my circuit layout on the breadboard.
This leads to multiple problems:
1. My transistor got really heated. Initially I plugged the +/- wires to the breadboard. Then I tried the embedded power input and use the Vin pin to power the arduino, but unfortunately the same problem occurs. This also leads to my second problem ->
2. My arduino port was not recognized by the program. The error message was:
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00
This problem has occurred before when I burned the arduino, so I thought the same thing was happening. But the led light on the arduino was still lit so I decided to google and look into the problem. I did the following things and nothing worked:
– check that I have the right board and port selected in the GUI
– exit Arduino software, disconnect Arduino USB, wait a minute, reconnect and try again
In the end, I unplugged every pin that was connected to the arduino and it worked! And I plugged back the pins one at a time to see what exactly was causing the problem. I came to the conclusion that my arduino could not handle two servo inputs.
To be safe, I decided to get rid of the transistor and go back to using the external power box instead.
3. Servo twitching. I initially mapped my IR read data to a servo range of 0-180, and the servo would twitch and have negative values. I then realized the particular servo I selected had a range of -90~90.
4. I also shortcircuit-ed one of my servos, but my arduino could not handle 2 servos anyway, so I had to rely on the one servo to perform.
Lessons learned:
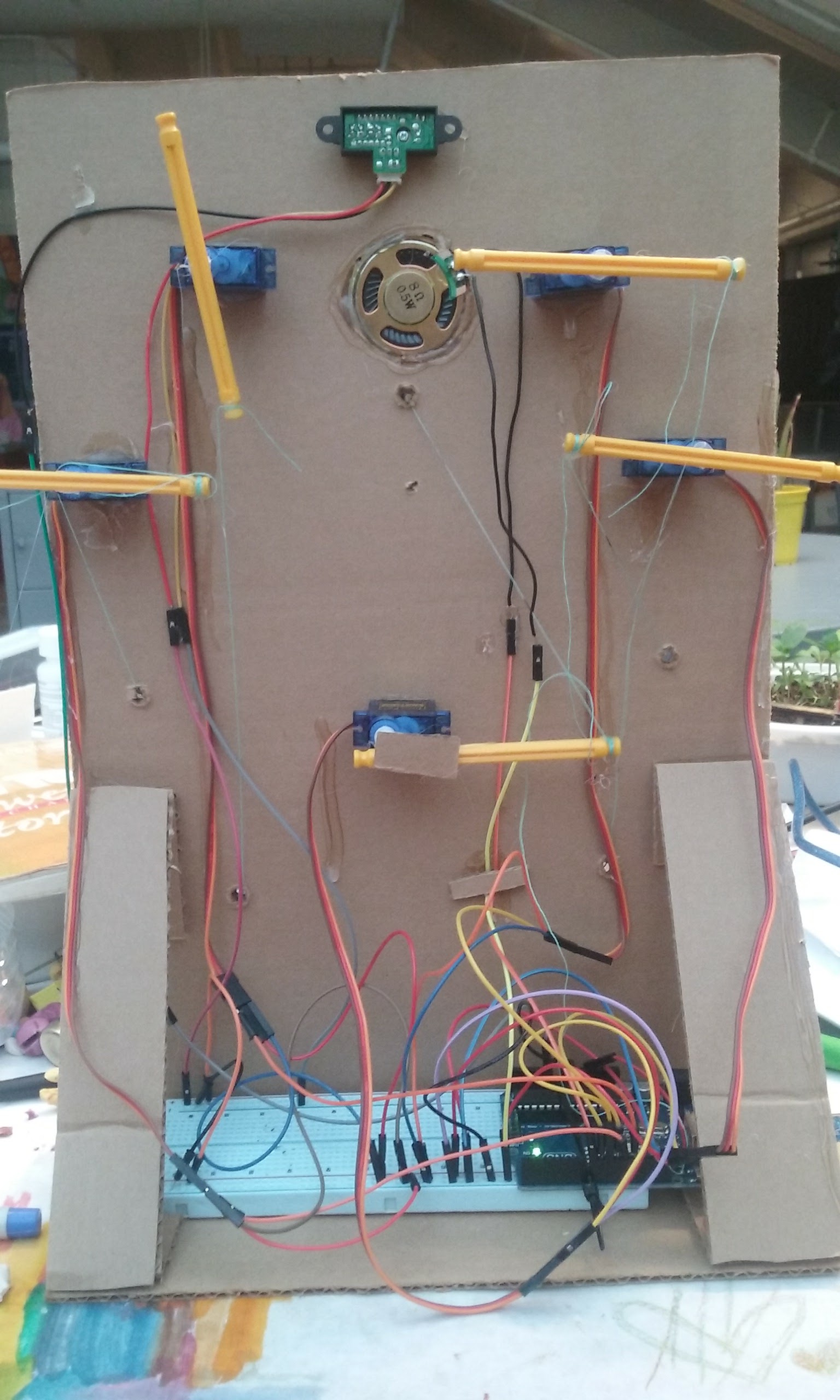
- Do not glue your parts until your are certain the circuit would work. I could have switch out of my burned servo, but I hotglued it for my prototype and it became a restraint.
- Be careful when using external power. I have yet to figure out what is wrong and what a better alternative would be.
- Wiring should be as simple as possible. I was using a lot of wires to connect things where instead I could have plugged the +/- wires directly into the +/- on the breadboard.


 nds. I found a baby doll at a local goodwill and from there took its built in button and dialog and rewired it into my bread board in order to use the switch to trigger its pre recorded sayings as well as my components. When its foot is pressed a speaker in its back will begin to let out a wailing sound as a servo begins to turn its head 360 degrees. It will spin until the sound ends. Each time you press the foot you also get a creepy randomized saying from the baby (that of which came with the doll). If I were to do it over again I would have tinkered with the speaker I added and mess with the frequency. Secondly I wish I resolved the head rotation so that every 2 times you press its foot the head will come around to its original forward facing position, now it ends where ever the sound stops.
nds. I found a baby doll at a local goodwill and from there took its built in button and dialog and rewired it into my bread board in order to use the switch to trigger its pre recorded sayings as well as my components. When its foot is pressed a speaker in its back will begin to let out a wailing sound as a servo begins to turn its head 360 degrees. It will spin until the sound ends. Each time you press the foot you also get a creepy randomized saying from the baby (that of which came with the doll). If I were to do it over again I would have tinkered with the speaker I added and mess with the frequency. Secondly I wish I resolved the head rotation so that every 2 times you press its foot the head will come around to its original forward facing position, now it ends where ever the sound stops.