Category: GalleryPage 11 of 12
Student submissions documenting exercises, projects, and other assignments.
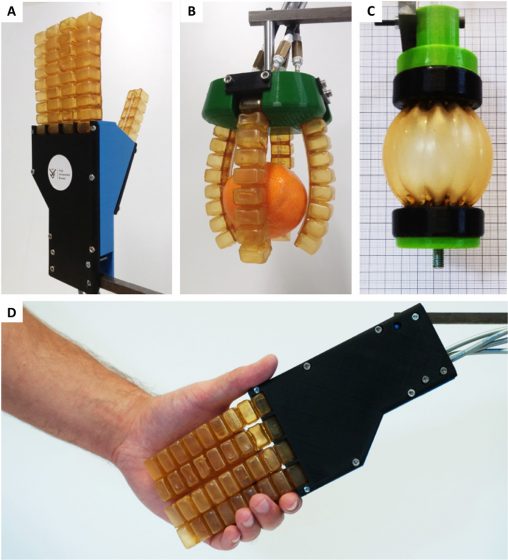
Pouch motors are printable soft actuators that could be used to mass-produce robots. What feature of the work could we specifically evolve into a technique for wearable kinetic…
Precedent Research 1 : Michelle Murray 1/20/22 I was particularly drawn to the robotic clothing project titled “FLOWING WATER, STANDING TIME” by Ying Gao. Ying Gao is a…
Jasmine Cheng Result:3 interactive dresses that change shapes in the pleats based on sensors, using pneumatic actuators What feature of the work could we specifically evolve into a…
By Daniela Castleberg PneUI is a project that came out of the Tangible Media Group at MIT that researches ways to create wearable technology enabled by pneumatics and…
Pouch Motors: Printable/Inflatable Soft Actuators for Robotics – Ryuma Niiyama, Daniela Rus, and Sangbae Kim I really enjoyed learning about these pouch motors. I always imagined robots being…
Walking City is a collection of interactive dresses made out of nylon, cotton, and electronic sensors that can be altered using pneumatics. The designer utilizes origami-like shapes in…
Blue Sail is an installation work of blue chiffon blown by an oscillating fan underneath by German artist Hans Haacke. This work is interesting since its movement comes…
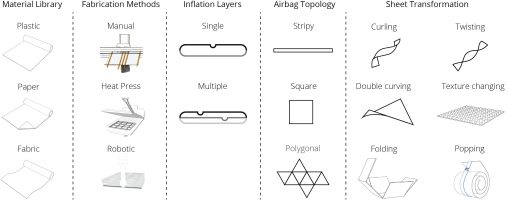
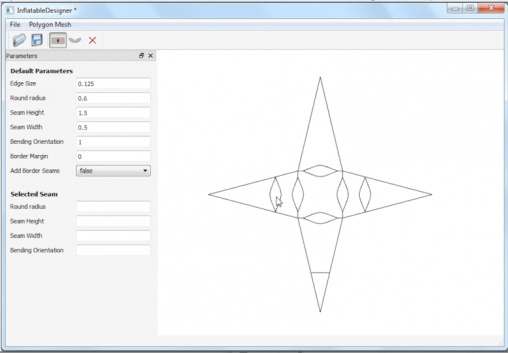


Overview A completed design and manufacturing process for converting sheets of material into 3D objects using pneumatic actuation. This research introduces a universal bending mechanism design platform and…